Master's Thesis Projects
This page contains a list of the Master's Thesis Projects that have been finished in the group. The list is sorted by year. Note that the list is not complete, as it is up to the student to create a website for their project.
If you are interested in doing a Master's Thesis Project with us, please check Master's Thesis Proposals.
2026
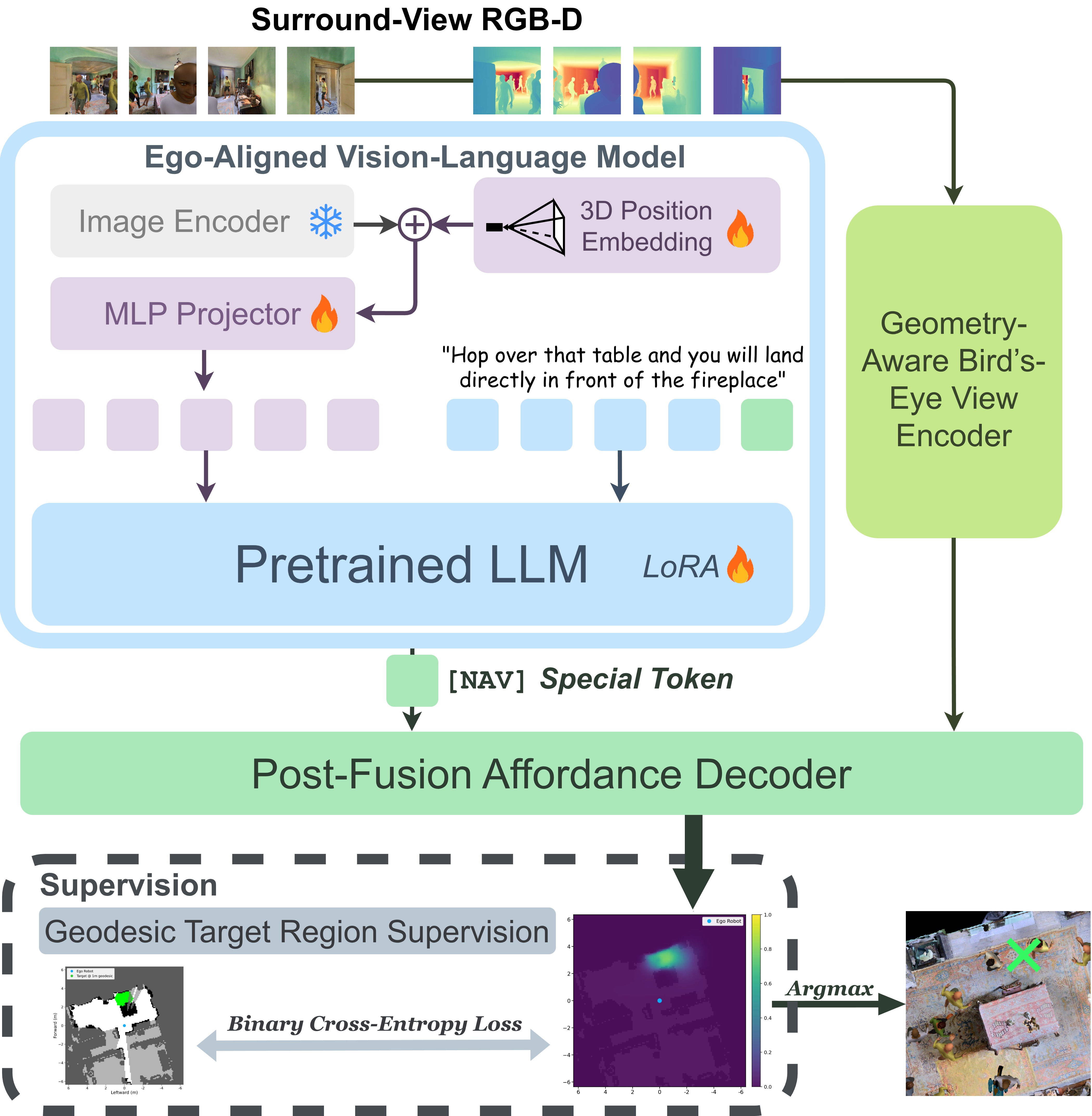
Language-Conditioned Navigation Affordance Prediction under Occlusion
This thesis focuses on language-conditioned local navigation under occlusion, where a robot needs to infer a nearby traversable target from free-form, spatially grounded natural-language instructions and current surround-view RGB-D observations. Our method predicts an ego-centric bird's-eye view affordance heatmap by combining vision-language model reasoning with geometry-aware bird's-eye view features. In unseen Habitat environments, it substantially improves accuracy averaged over geodesic thresholds compared with prior image-space baselines, especially when the target is occluded.
See details and results!2025
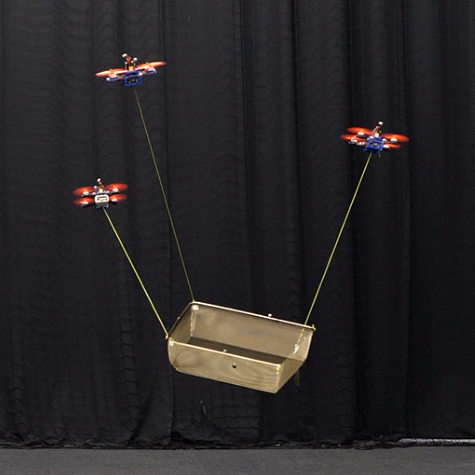
Decentralized Aerial Manipulation of a Cable-Suspended Load Using Multi-Agent Reinforcement Learning
This paper presents the first decentralized method to enable real-world 6-DoF manipulation of a cable-suspended load using a team of Micro-Aerial Vehicles (MAVs). Our method leverages multi-agent reinforcement learning (MARL) to train an outer-loop control policy for each MAV. Unlike state-of-the-art controllers that utilize a centralized scheme, our policy does not require global states, inter-MAV communications, nor neighboring MAV information. Instead, agents communicate implicitly through load pose observations alone, which enables high scalability and flexibility. It also significantly reduces computing costs during inference time, enabling onboard deployment of the policy. In addition, we introduce a new action space design for the MAVs using linear acceleration and body rates. This choice, combined with a robust low-level controller, enables reliable sim-to-real transfer despite significant uncertainties caused by cable tension during dynamic 3D motion. We validate our method in various real-world experiments, including full-pose control under load model uncertainties, showing setpoint tracking performance comparable to the state-of-the-art centralized method. We also demonstrate cooperation amongst agents with heterogeneous control policies, and robustness to the complete in-flight loss of one MAV.
See details and results!%20for%20best%20results,%20and%20keep%20it%20a%20reasonable%20size%20(like%201-2MB).%20Can%20also%20be%20a%20gif
)
SADCHER: Scheduling using Attention-based Dynamic Coalitions of Heterogeneous Robots in Real-Time
We present Sadcher, a real-time task assignment framework for heterogeneous multi-robot teams that incorporates dynamic coalition formation and task precedence constraints. Sadcher is trained through Imitation Learning and combines graph attention and transformers to predict assignment rewards between robots and tasks. Based on the predicted rewards, a relaxed bipartite matching step generates high-quality schedules with feasibility guarantees. We explicitly model robot and task positions, task durations, and robots’ remaining processing times, enabling advanced temporal and spatial reasoning and generalization to environments with different spatiotemporal distributions compared to training. Trained on optimally solved small-scale instances, our method can scale to larger task sets and team sizes. Sadcher outperforms other learning-based and heuristic baselines on randomized, unseen problems for small and medium-sized teams with computation times suitable for real-time operation. We also explore sampling-based variants and evaluate scalability across robot and task counts. In addition, we release our dataset of 250,000 optimal schedules to facilitate future research.
See details and results!
Motion planning for mobile manipulators in multi-agent settings using MPC
This thesis investigates motion planning via Model Predictive Control for mobile manipulators in multi-agent settings. The goal is to generate collision-free whole-body motions for mobile manipulators while avoiding collisions with other agents. This page is still in progress, stay tuned!
See details and results!2024
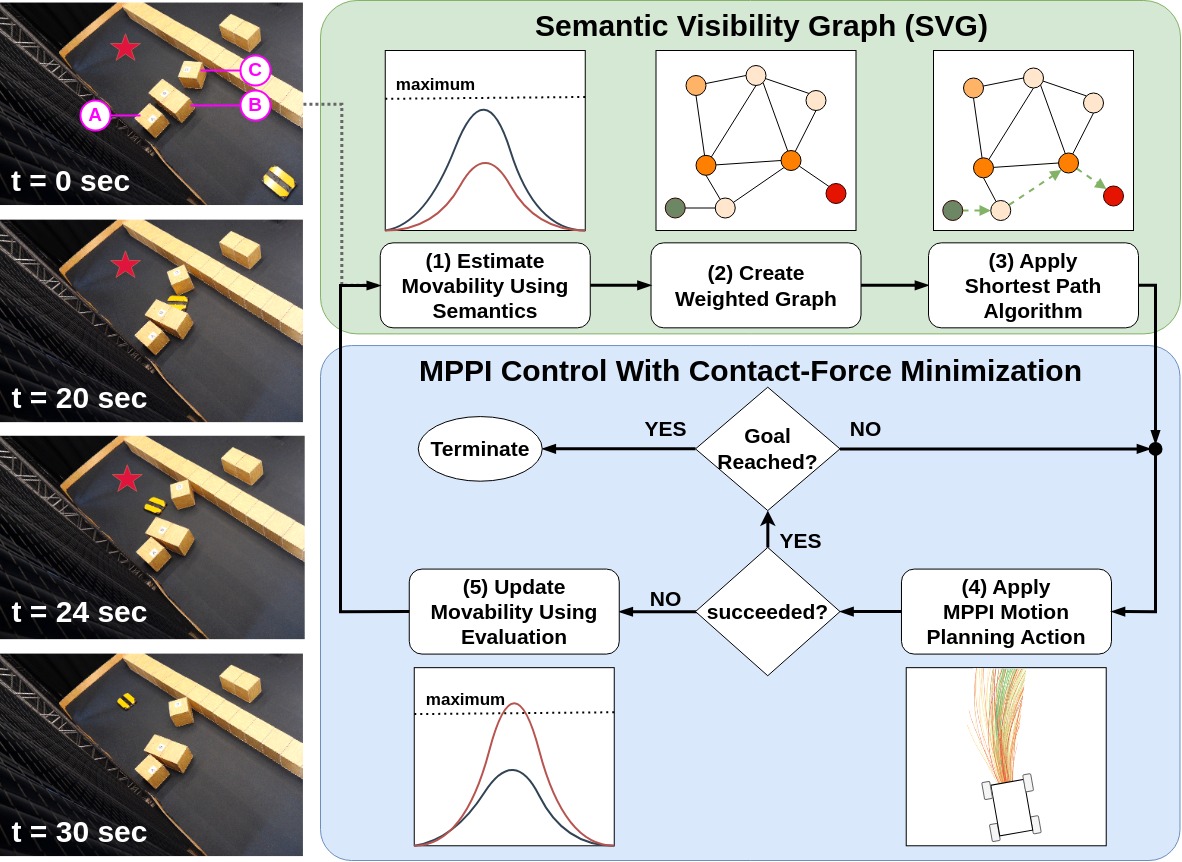
Pushing Through Clutter With Movability Awareness of Blocking Obstacles
Navigation Among Movable Obstacles (NAMO) poses a challenge for traditional path-planning methods when obstacles block the path, requiring push actions to reach the goal. We propose a framework that enables movability-aware planning to overcome this challenge without relying on explicit obstacle placement. Our framework integrates a global Semantic Visibility Graph and a local Model Predictive Path Integral (SVG-MPPI) approach to efficiently sample rollouts, taking into account the continuous range of obstacle movability. A physics engine is adopted to simulate the interaction result of the rollouts with the environment, and generate trajectories that minimize contact force. In qualitative and quantitative experiments, SVG-MPPI outperforms the existing paradigm that uses only binary movability for planning, achieving higher success rates with reduced cumulative contact forces.
See details and results!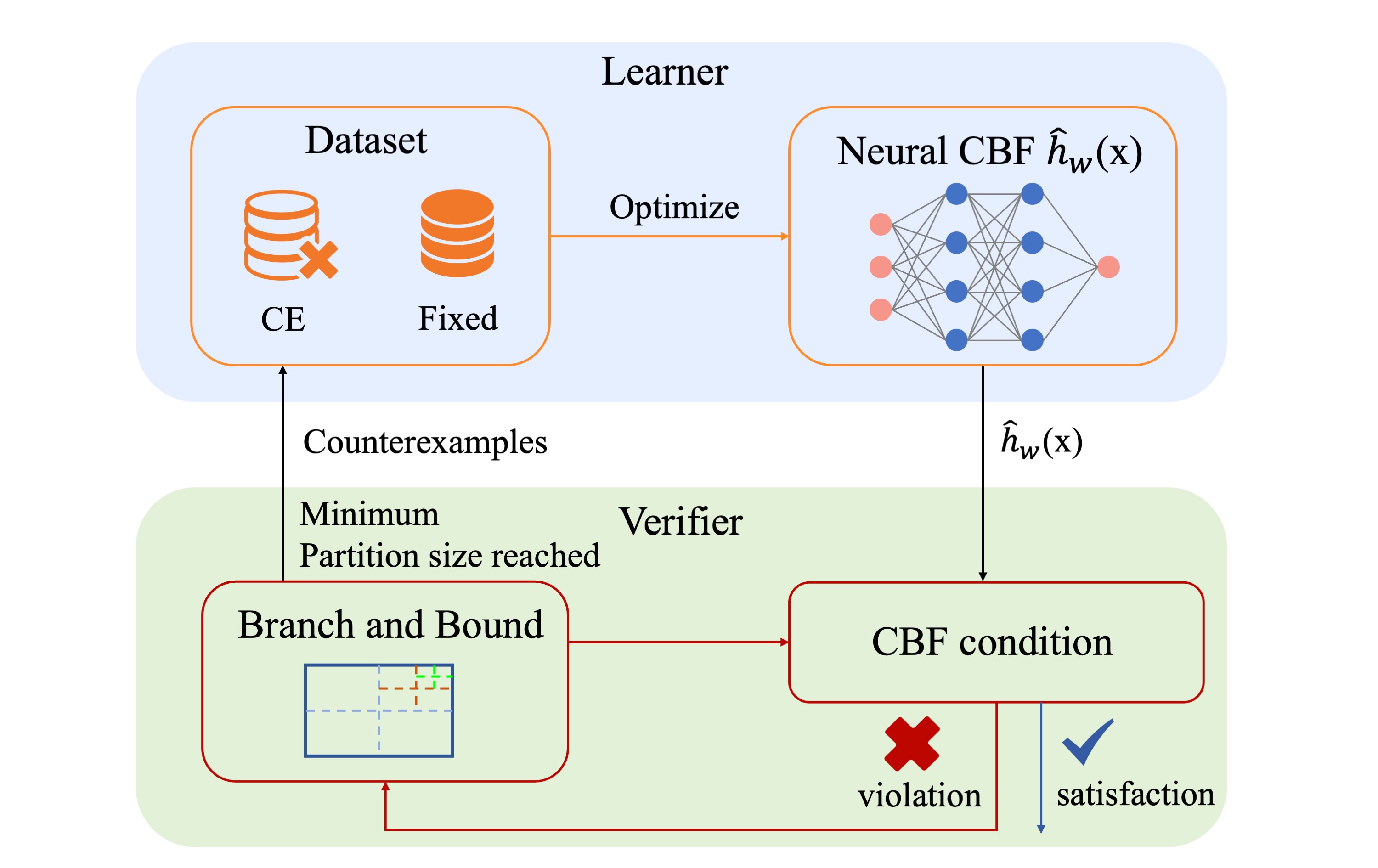
Simultaneous Synthesis and Verification of Neural Control Barrier Functions through Branch-and-Bound Verification-in-the-loop Training
This thesis focuses on Certified Learning based on Control Barrier Functions (CBFs). While learning-based control techniques often outperform classical controller designs, safety requirements limit the acceptance of such methods in many applications. CBFs have been widely used to provide formal safety guarantees for safety-critical systems. However, it is non-trivial to design a CBF. Utilizing neural networks as CBFs has shown great success, but it necessitates their certification as CBFs. In this work, we leverage bound propagation techniques and the Branch-and-Bound scheme to efficiently verify that a neural network satisfies the conditions to be a CBF over the continuous state space. To accelerate training, we further present a framework that embeds the verification scheme into the training loop to synthesize and verify a neural CBF simultaneously.
See details and results!
Current-Based Impedance Control for Mobile Manipulators Without Force/Torque Sensors
This project explores the use of impedance control on mobile manipulators consisting of an off-the-shelf arm and mobile base. The aim is to achieve compliant behavior, enabeling the system to effectively interact with its environment. Impedance control relies on contact information usually obtained from joint torque measurements. However, off-the-shelf robots may lack such sensors, and adding them is costly. Additionally, the robots may not support torque control, limiting the application of impedance control. Thus, this project presents a calibration method that enables the application of impedance control on a current-controlled manipulator. Moreover, it presents to operational modes for interacting with the mobile manipulator.
See details and results!2023

Multi-Modal MPPI and Active Inference for Reactive Task and Motion Planning
Task and Motion Planning (TAMP) has made strides in complex manipulation tasks, yet the execution robustness of the planned solutions remains overlooked. In this work, we propose a method for reactive TAMP to cope with runtime uncertainties and disturbances. We combine an Active Inference planner (AIP) for adaptive high-level action selection and a novel Multi-Modal Model Predictive Path Integral controller (M3P2I) for low-level control. This results in a scheme that simultaneously adapts both high-level actions and low-level motions. The AIP generates alternative symbolic plans, each linked to a cost function for M3P2I. The latter employs a physics simulator for diverse trajectory rollouts, deriving optimal control by weighing the different samples according to their cost. This idea enables blending different robot skills for fluid and reactive plan execution, accommodating plan adjustments at both the high and low levels to cope, for instance, with dynamic obstacles or disturbances that invalidate the current plan. We have tested our approach in simulations and real-world scenarios.
See details and results!