TRiLOGy: Sustainable Transportation and Logistics Over Water: Electrification, Automation, and Optimization

People
Funding
NWO Top Sector Water & Maritime: the Blue route, 'Sustainable Transportation and Logistics over Water: Electrification, Automation and Optimization (TRiLOGy)', 2020-2024.
More LinksAbout the Project
TRiLOGy will unlock the potential of transportation and logistics in urban waterways with electric and autonomous vessels by enabling safer, more sustainable and efficient operations. The project is divided into two main modules:
- Autonomy
- Fleet management
The autonomy module, which is the focus of our group, aims at developing autonomy tools for navigation in inland waterways, among other manned and unmanned vessels. The main challenges to ensure safe and efficient navigation of autonomous vessels in urban waters is that of generating safe trajectories that (i) take into account the goals expressed by the high-level integrated strategy, (ii) take into account the complex dynamics of the vessel and (iii) coordinate with other traffic participants.
Partners




Related Publications
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
In IEEE Robotics and Automation Letters (RA-L),
2024.
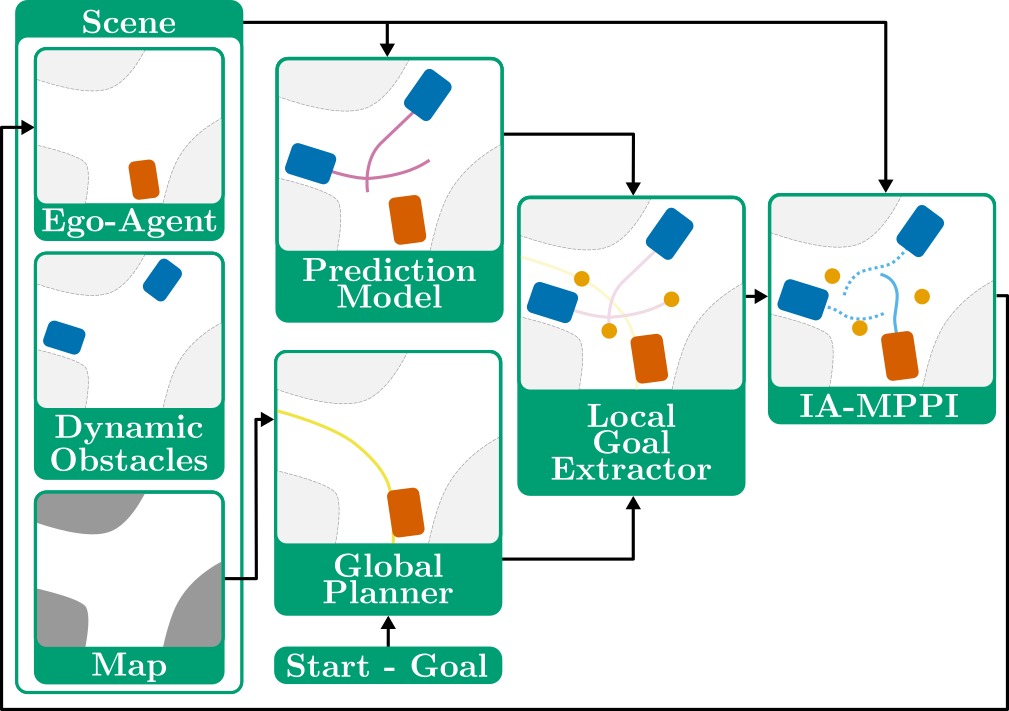
Interaction-Aware Sampling-Based MPC with Learned Local Goal Predictions
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems,
2023.
Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals
In , in IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Sampling-Based MPC Using a GPU-parallelizable Physics Simulator as Dynamic Model: an Open Source Implementation with IsaacGym
In Embracing Contacts Workshop at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Regulations Aware Motion Planning for Autonomous Surface Vessels in Urban Canals
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2022.