Pushing Through Clutter With Movability Awareness of Blocking Obstacles
Summary
Navigation Among Movable Obstacles (NAMO) poses a challenge for traditional path-planning methods when obstacles block the path, requiring push actions to reach the goal. We propose a framework that enables movability-aware planning to overcome this challenge without relying on explicit obstacle placement. Our framework integrates a global Semantic Visibility Graph and a local Model Predictive Path Integral (SVG-MPPI) approach to efficiently sample rollouts, taking into account the continuous range of obstacle movability. A physics engine is adopted to simulate the interaction result of the rollouts with the environment, and generate trajectories that minimize contact force. In qualitative and quantitative experiments, SVG-MPPI outperforms the existing paradigm that uses only binary movability for planning, achieving higher success rates with reduced cumulative contact forces.
Overview
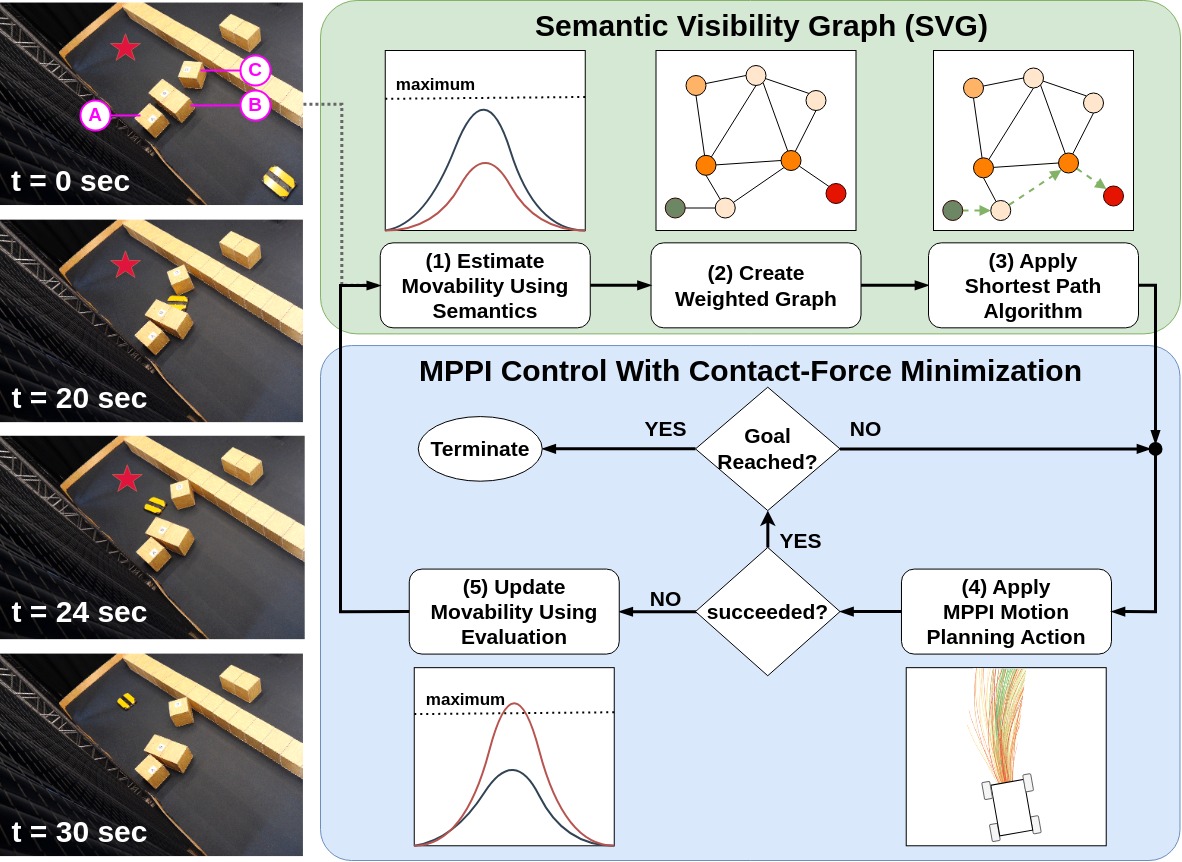
An overview of the proposed SVG-MPPI architecture where the SVG provides a weighted graph with efficient node placement around movable obstacles along which a lowest-effort path can be found. The generated set of waypoints guides the MPPI control strategy to efficiently sample rollouts around movable obstacles. If during interaction an obstacle is considered non-movable, the movability estimation gets updated and the path is replanned. Snapshots of a real-world example are shown on the left where the red star indicates the goal location and the masses of the obstacles are (A): 25 kg, (B): 20 kg, (C): 5 kg.
Example