Publications
2026
J78.
Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing
In IEEE Robotics and Automation Letters (RA-L),
2026.

J77.
Cross-Entropy Optimization of Physically Grounded Task and Motion Plans
In IEEE Robotics and Automation Letters (RA-L),
2026.
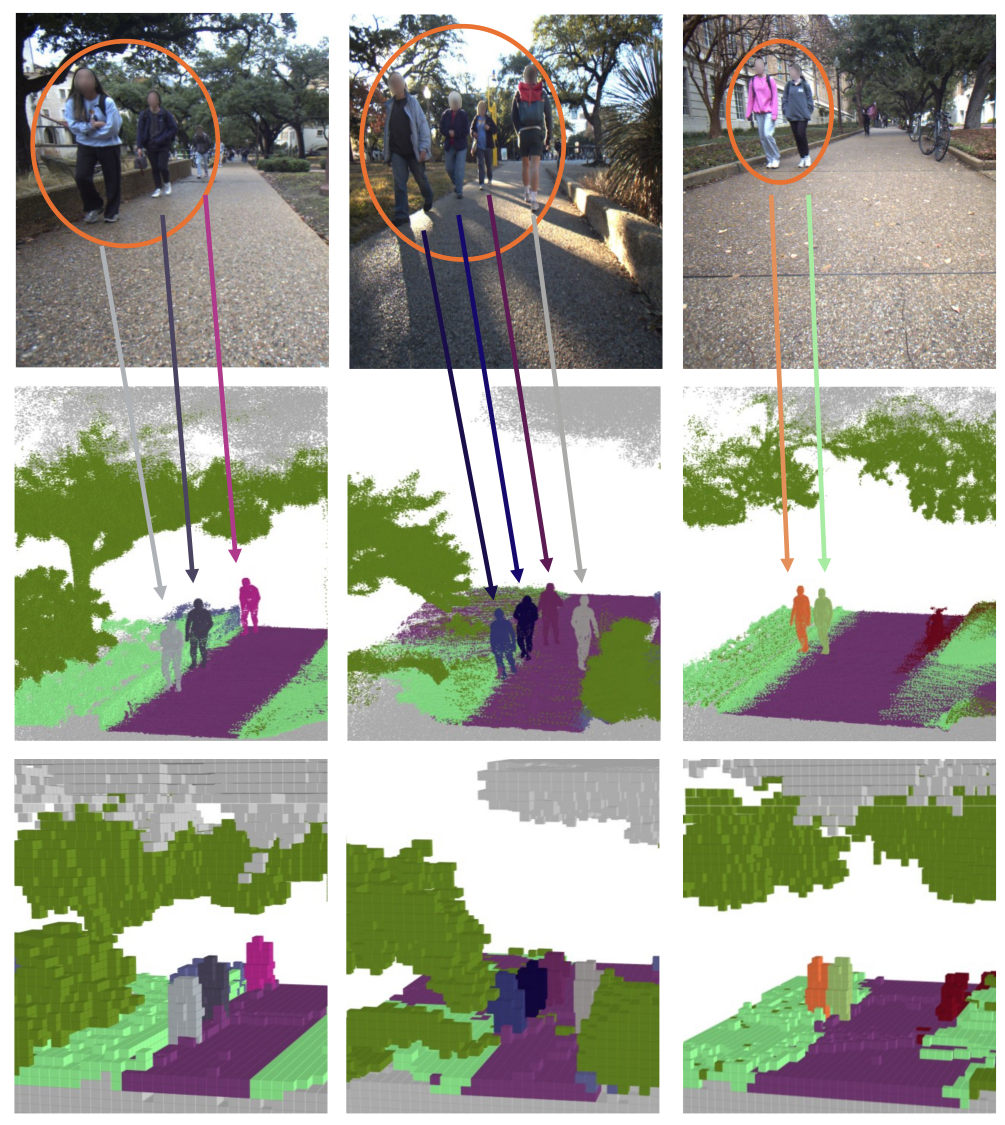
C89.
MobileOcc: A Human-Aware Semantic Occupancy Dataset for Mobile Robots
In European Conference on Computer Vision (ECCV),
2026.
2025
J76.
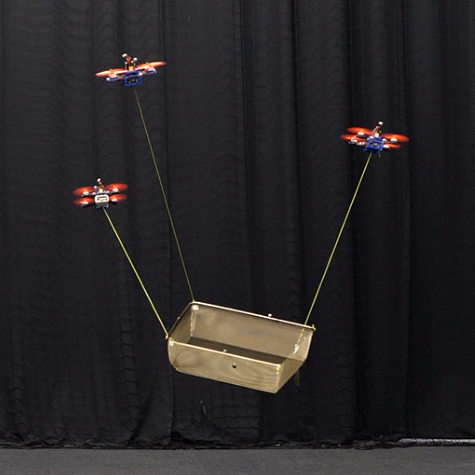
Agile and Cooperative Aerial Manipulation of a Cable-Suspended Load
In Science Robotics,
2025.
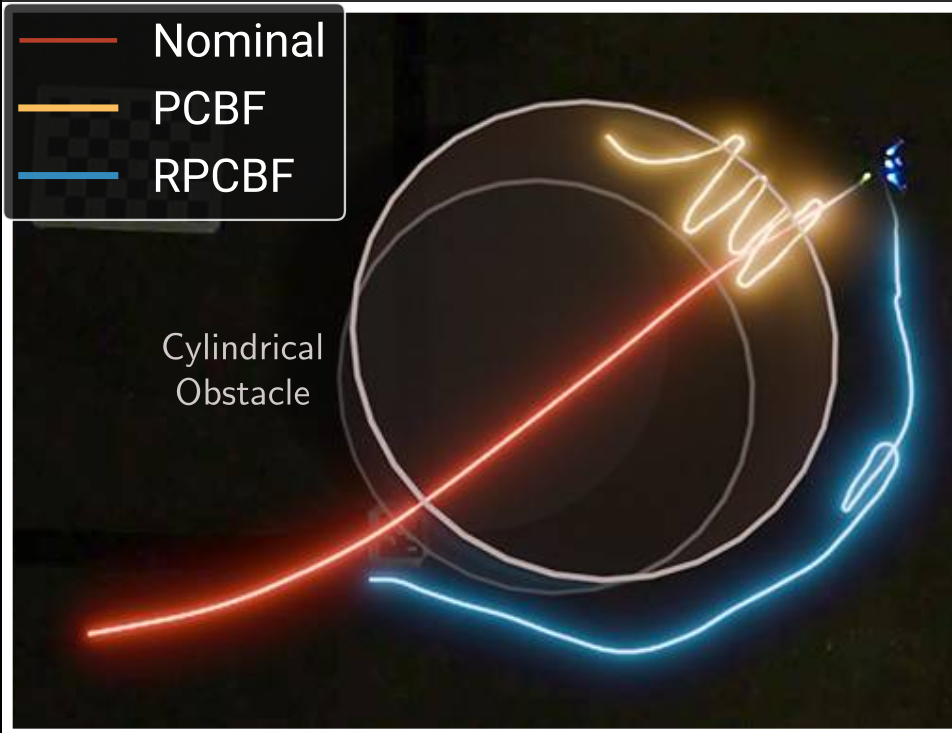
J75.
Safety on the Fly: Constructing Robust Safety Filters Via Policy Control Barrier Functions At Runtime
In IEEE Robotics and Automation Letters (RA-L),
2025.
J74.
Scenario-based motion planning with bounded probability of collision
In The International Journal of Robotics Research (IJRR),
2025.
J73.
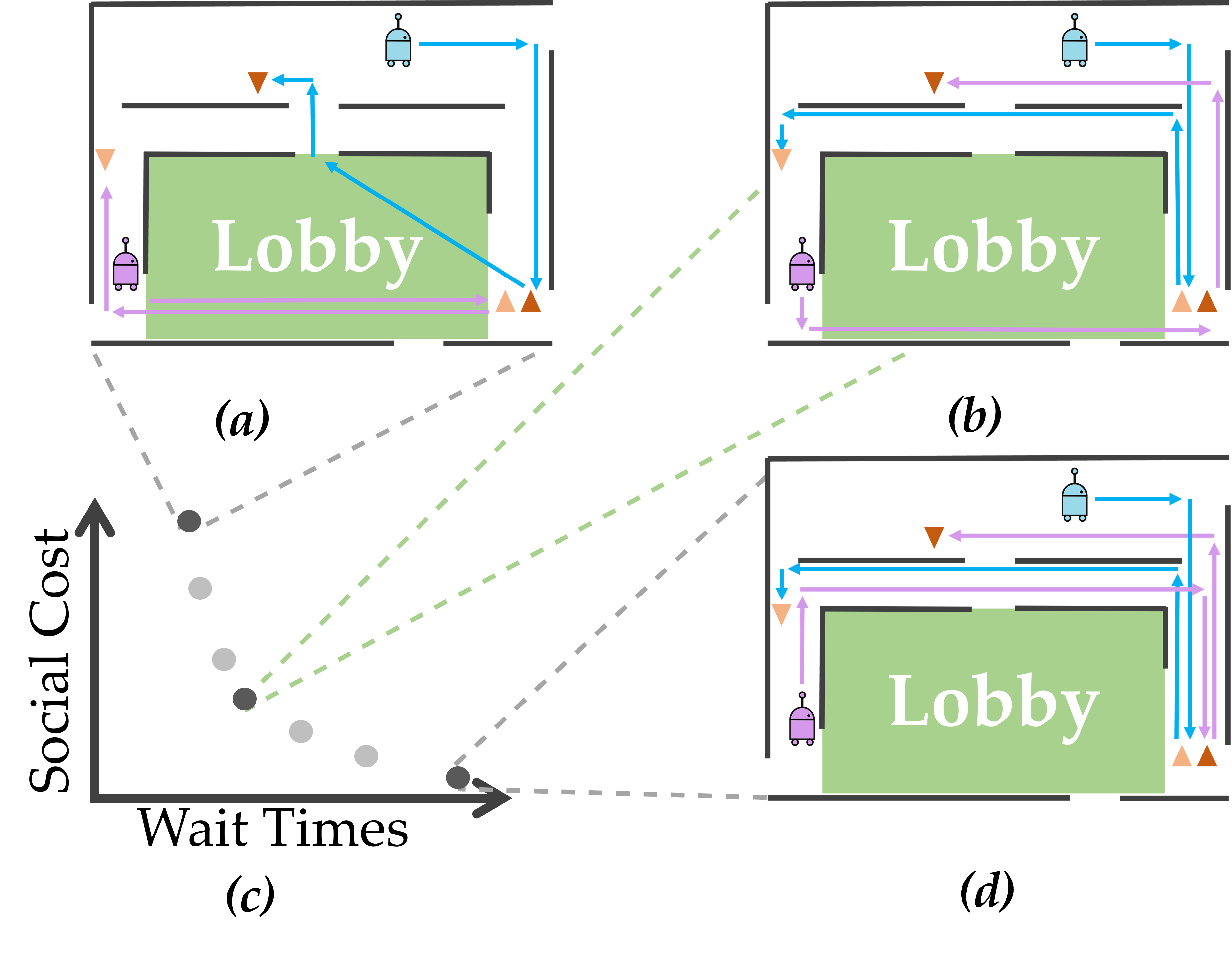
SHINE: Social Homology Identification for Navigation in Crowded Environments
In International Journal of Robotics Research (IJRR),
2025.

J72.
Overcoming Explicit Environment Representations with Geometric Fabrics
In IEEE Robotics and Automation Letters (RA-L),
2025.
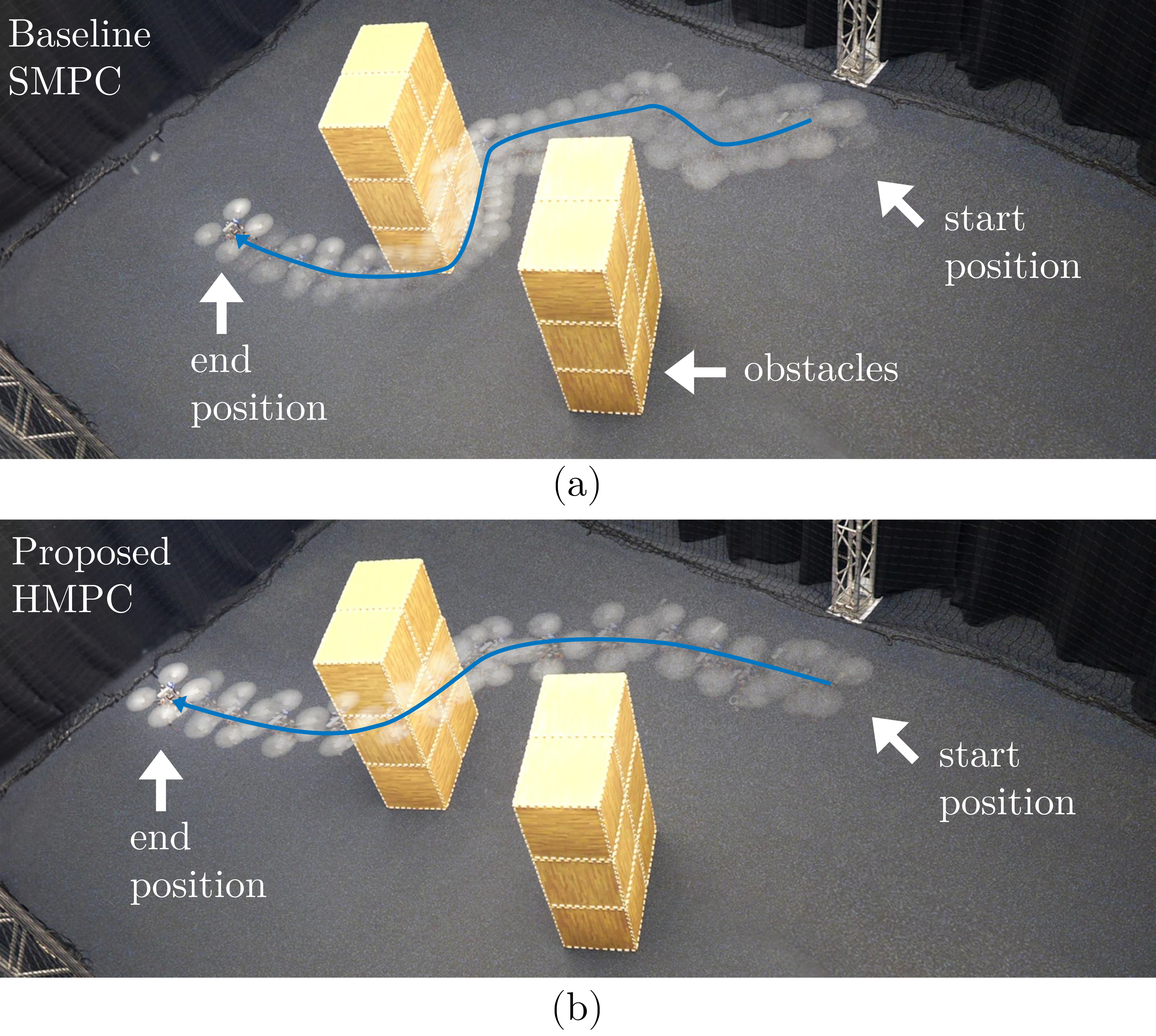
J71.
Embedded Hierarchical MPC for Autonomous Navigation
In IEEE Transactions on Robotics (T-RO),
2025.
J70.
Globally-Guided Geometric Fabrics for Reactive Mobile Manipulation in Dynamic Environments
In IEEE Robotics and Automation Letters (RA-L),
2025.
J69.
What do walking and e-hailing bring to scale economies in on-demand mobility?
In Transportation Research Part B: Methodological,
2025.
J68.
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
In IEEE Robotics and Automation Letters (RA-L),
2025.
J67.
Particle-based Instance-aware Semantic Occupancy Mapping in Dynamic Environments
In IEEE Transactions on Robotics (T-RO),
2025.
C88.
Decentralized Real-Time Planning for Multi-UAV Cooperative Manipulation via Imitation Learning
In IEEE Int. Symposium on Multi-Robot & Multi-Agent Systems (MRS),
2025.
C87.
SADCHER: Scheduling using Attention-based Dynamic Coalitions of Heterogeneous Robots in Real-Time
In IEEE Int. Symposium on Multi-Robot & Multi-Agent Systems (MRS),
2025.
C86.
Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2025.
C85.
Active Disturbance Rejection Control (ADRC) for Trajectory Tracking of a Seagoing USV: Design, Simulation, and Field Experiments
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2025.
C84.
Decentralized Aerial Manipulation of a Cable-Suspended Load Using Multi-Agent Reinforcement Learning
In 2025 Conference on Robot Learning (CoRL),
2025.
C83.
A Vehicle System for Navigating Among Vulnerable Road Users Including Remote Operation
In IEEE Symposium on Intelligent Vehicles (IV),
2025.
C82.
TamedPUMA: safe and stable imitation learning with geometric fabrics
In Learning for Dynamics and Control (L4DC),
2025.
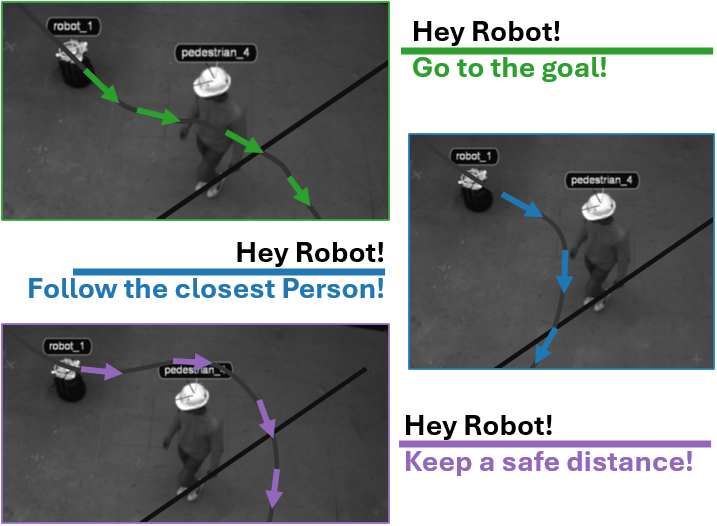
C81.
Hey Robot! Personalizing Robot Navigation through Model Predictive Control with a Large Language Model
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2025.
C80.
Predictability Awareness For Efficient and Robust Multi-Agent Coordination
In 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS),
2025.
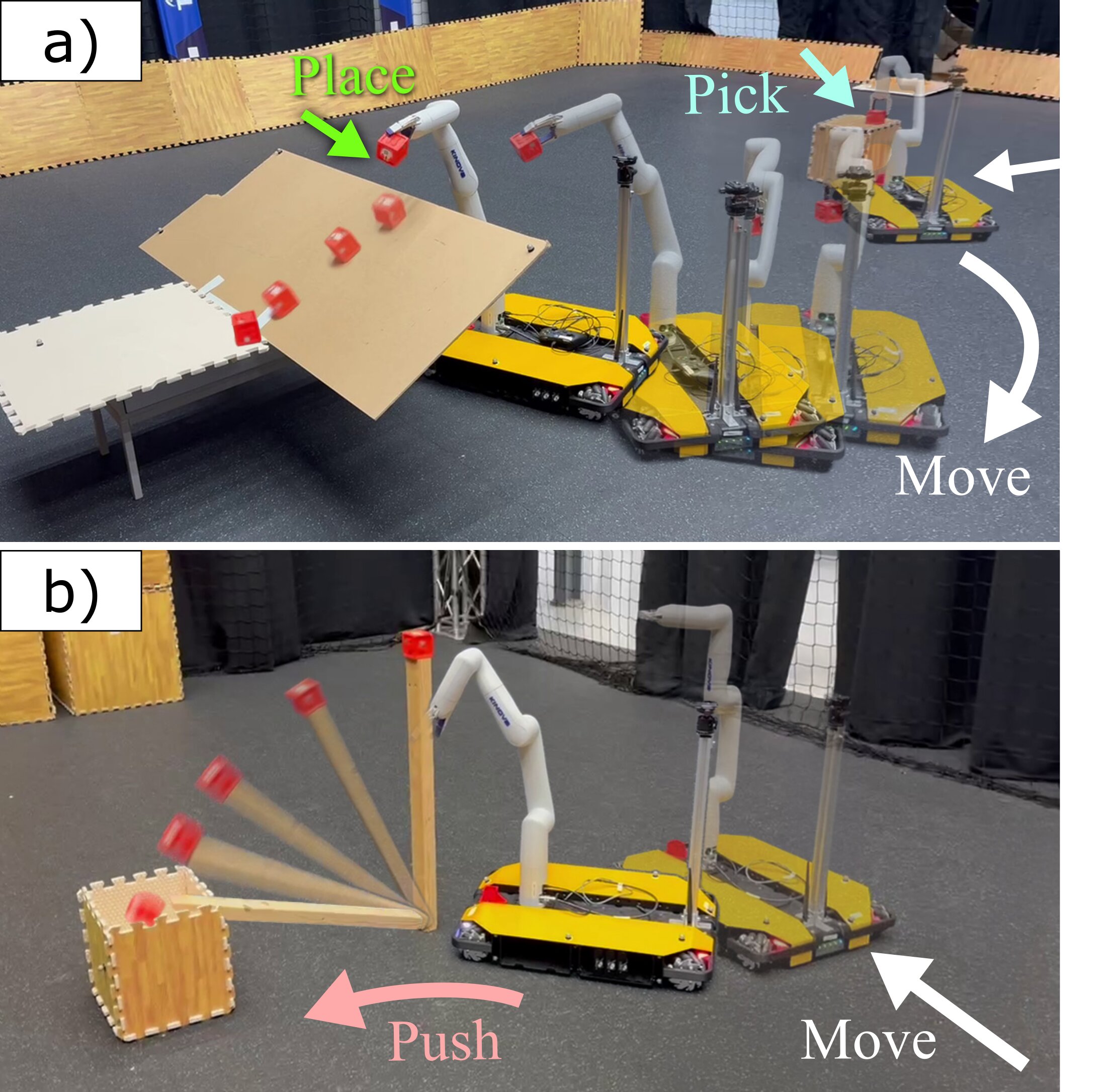
C79.
Pushing Through Clutter With Movability Awareness of Blocking Obstacles
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2025.
2024
J66.
Improving public transportation via line-based integration of on-demand ridepooling
In Transportation Research Part A: Policy and Practice,
2024.
J65.
Topology-Driven Parallel Trajectory Optimization in Dynamic Environments
In IEEE Transaction on Robotics (T-RO),
2024.

J64.
Beyond the last mile: different spatial strategies to integrate on-demand services into public transport in a simplified city
In Public Transport,
2024.
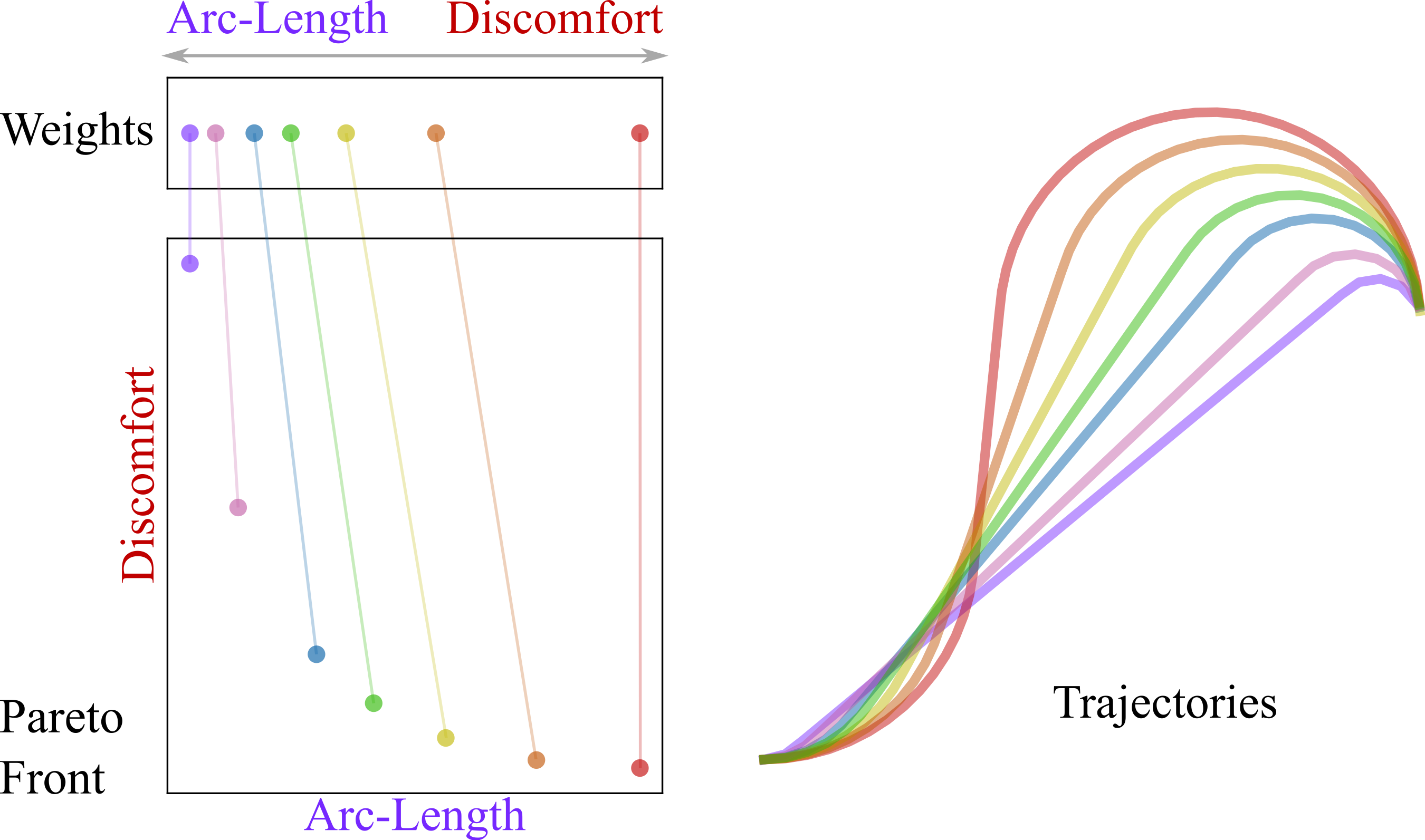
J63.
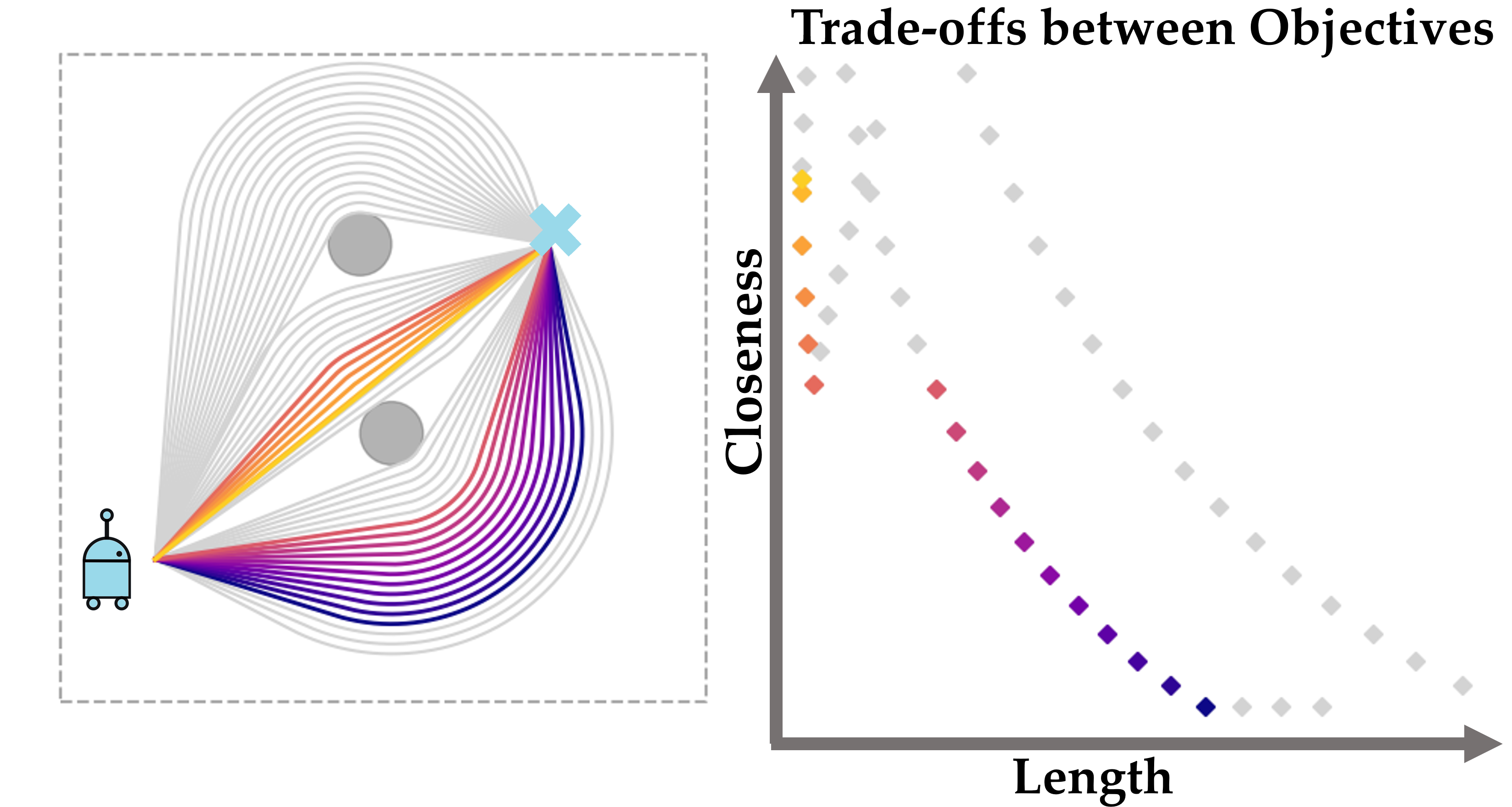
Regret-based Sampling of Pareto Fronts for Multi-Objective Robot Planning Problems
In IEEE Transaction on Robotics(T-RO),
2024.
J62.
Multi-Modal MPPI and Active Inference for Reactive Task and Motion Planning
In IEEE Robotics and Automation Letters (RA-L),
2024.
J61.
RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
In IEEE Transactions on Intelliegent Vehicles (T-IV),
2024.
J60.
Design of mixed fixed-flexible bus public transport networks by tracking the paths of on-demand vehicles
In Transportation Research Part C: Emerging Technologies,
2024.
J59.
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
In IEEE Robotics and Automation Letters (RA-L),
2024.
J58.
Reducing the Minimal Fleet Size by Delaying Individual Tasks
In IEEE Transactions on Intelligent Transportation Systems,
2024.
J57.
Reachability-based confidence-aware probabilistic collision detection in highway driving
In S.I. Safety for Intelligent and Connected Vehicles, Engineering,
2024.
J56.
Distributed multi-target tracking and active perception with mobile camera networks
In S.I. Collaborative Mobile Smart Cameras, Computer Vision and Image Understanding,
2024.
J55.
Statistically Distinct Plans for Multi-Objective Task Assignment
In IEEE Transaction on Robotics(T-RO),
2024.
J54.
Scalarizing Multi-Objective Robot Planning Problems Using Weighted Maximization
In IEEE Robotics and Automation Letters (RA-L),
2024.
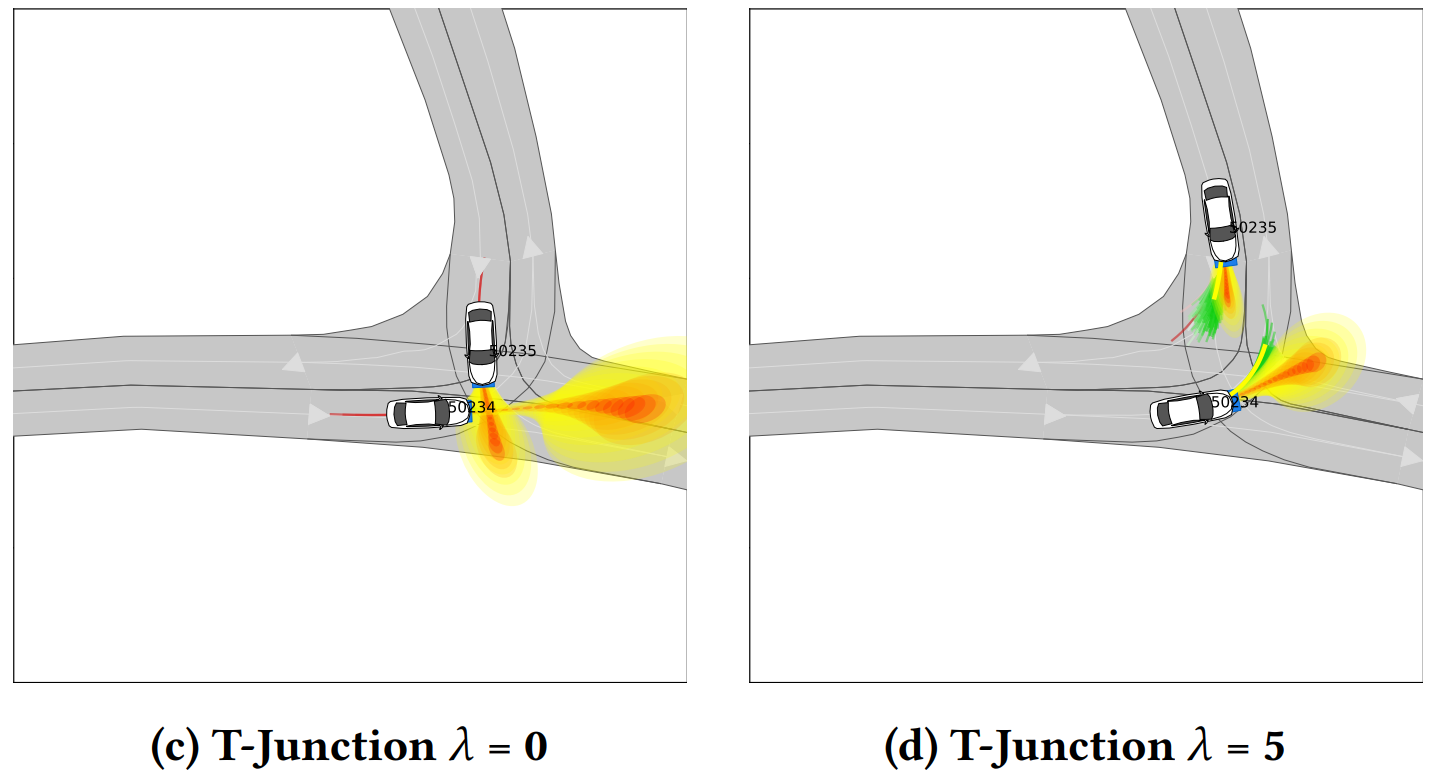
J53.
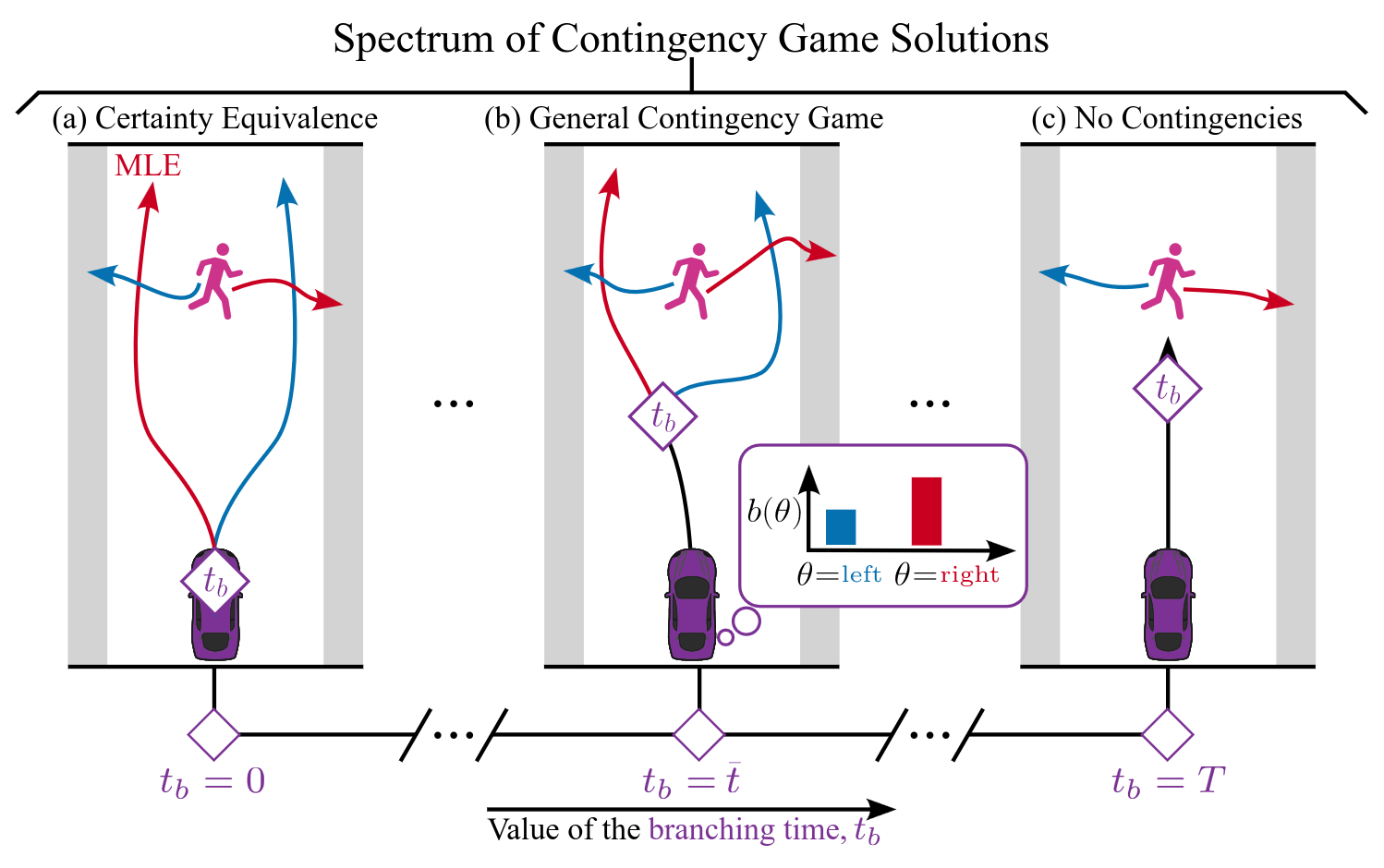
Contingency Games for Multi-Agent Interaction
In Robotics and Automation Letters (RA-L),
2024.
C78.
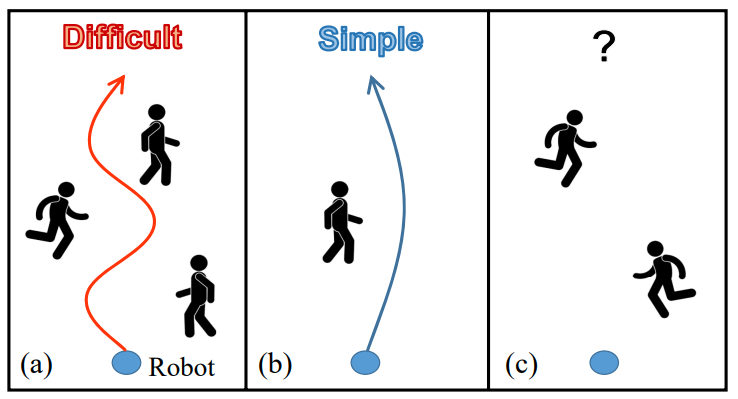
Evaluating Dynamic Environment Difficulty for Obstacle Avoidance Benchmarking
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2024.
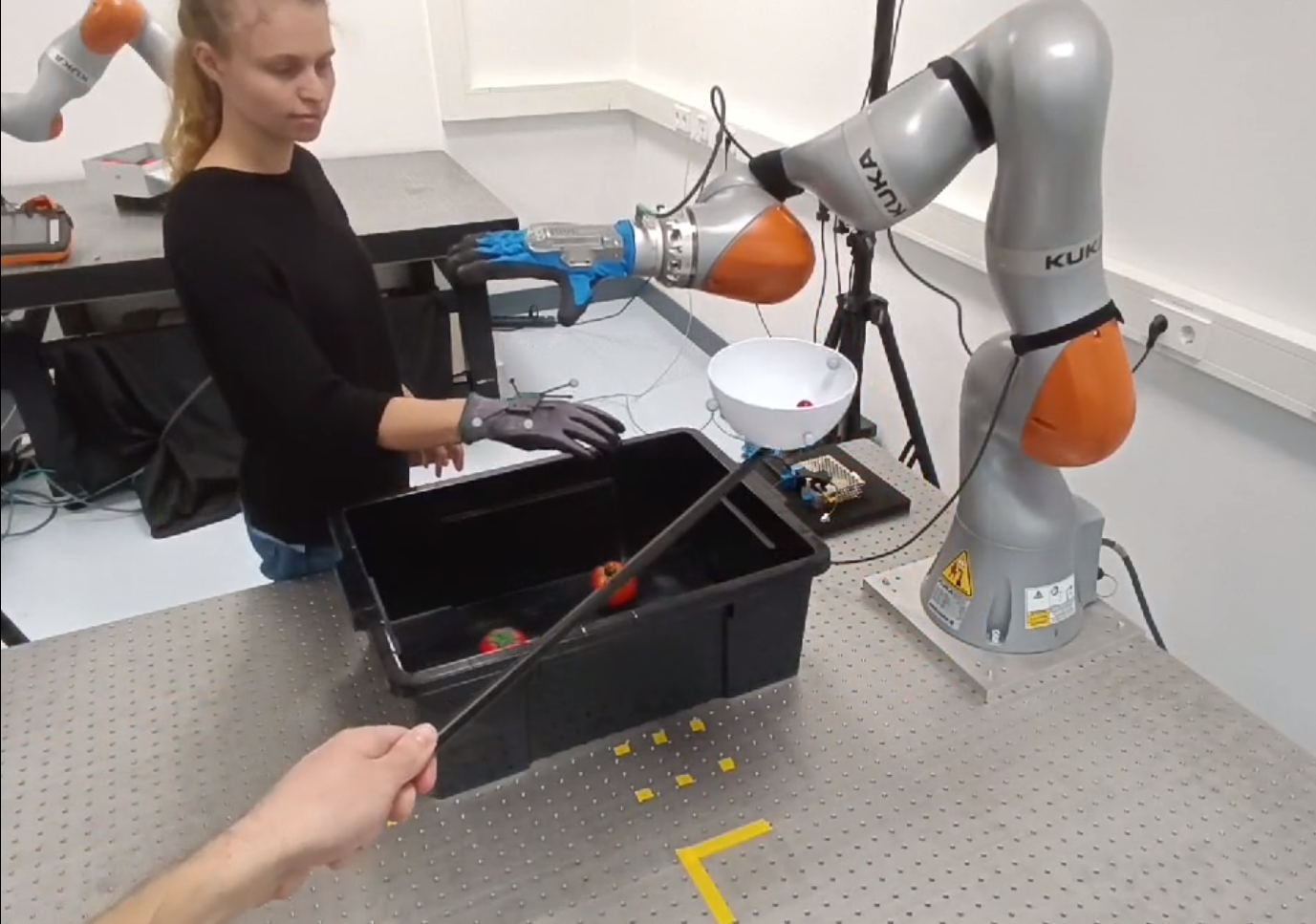
C77.
Current-Based Impedance Control for Interacting with Mobile Manipulators
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),
2024.
C76.
Fleet Sizing for the Flash Delivery Problem from Multiple Stores: a Case Study in Amsterdam
In IEEE International Conference on Intelligent Transportation Systems (ITSC),
2024.
C75.
Auto-Encoding Bayesian Inverse Games
In 16th Workshop on the Algorithmic Foundations of Robotics (WAFR),
2024.
C74.
ROME: Robust Multi-Modal Density Estimator
In 33rd International Joint Conference on Artificial Intelligence (IJCAI),
2024.
C73.
Demonstrating Adaptive Mobile Manipulation in Retail Environments
In , Proc. of Robotics: Science and Systems (RSS),
2024.

C72.
TrajFlow: Learning Distributions over Trajectories for Human Behavior Prediction
In IEEE Intelligent Vehicles Symposium (IV),
2024.
C71.
Simultaneous Synthesis and Verification of Neural Control Barrier Functions through Branch-and-Bound Verification-in-the-Loop Training
In European Control Conference (ECC),
2024.
C70.
Probabilistic Motion Planning and Prediction via Partitioned Scenario Replay
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2024.
C69.
Decentralized Multi-Agent Trajectory Planning in Dynamic Environments with Spatiotemporal Occupancy Grid Maps
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2024.
W15.
Safe and stable motion primitives via imitation learning and geometric fabrics
In Robotics: Science and Systems, Workshop on Structural Priors as Inductive Biases for Learning Robot Dynamics,
2024.
W14.
Reactive grasp and motion planning for adaptive mobile manipulation among obstacles
In Robotics: Science and Systems, Workshop on Frontiers of Optimization for Robotics,
2024.
W13.
Physically Grounded Optimal Realizations of Symbolic Plans
In Robotics: Science and Systems (RSS), Workshop on Frontiers of Optimization for Robotics,
2024.
W12.
Learning Social Homologies for Navigation
In Robotics: Science and Systems (RSS), Workshop on Unsolved Problems in Social Robot Navigation,
2024.
W11.
Interaction-Aware Autonomous Navigation among Pedestrians using Social Forces Response Dynamics
In Robotics: Science and Systems (RSS), Workshop on Unsolved Problems in Social Robot Navigation,
2024.

2023
J52.
Continuous Occupancy Mapping in Dynamic Environments Using Particles
In IEEE Transactions on Robotics (T-RO),
2023.
J51.
Learning scalable and efficient communication policies for multi-robot collision avoidance
In Autonomous Robots 47, 1275-1297,
2023.
J50.
Online flash delivery from multiple depots
In Transportation Letters,
2023.
J49.
Optimizing Task Waiting Times in Dynamic Vehicle Routing
In IEEE Robotics and Automation Letters (RA-L),
2023.
J48.
Online and offline learning of player objectives from partial observations in dynamic games
In The International Journal of Robotics Research (IJRR),
2023.
J47.
Economies and diseconomies of scale in on-demand ridepooling systems
In Economics of Transportation,
2023.
J46.
Active Classification of Moving Targets with Learned Control Policies
In IEEE Robotics and Automation Letters (RA-L),
2023.
J45.
Ride-pooling adoption, efficiency and level of service under alternative demand, behavioural and pricing settings
In Transportation Planning and Technology,
2023.
J44.
Learning to Play Trajectory Games Against Opponents with Unknown Objectives
In IEEE Robotics and Automation Letters (RA-L),
2023.
J43.
Group-based Distributed Auction Algorithms for Multi-Robot Task Assignment
In IEEE Transactions on Automation Science and Engineering (T-ASE),
2023.
J42.
Dynamic Optimization Fabrics for Motion Generation
In IIEEE Transactions on Robotics (T-RO),
2023.
J41.
RAST: Risk-Aware Spatio-Temporal Safety Corridors for MAV Navigation in Dynamic Uncertain Environments
In IEEE Robotics and Automation Letters (RA-L),
2023.
C68.
Interaction-Aware Sampling-Based MPC with Learned Local Goal Predictions
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems,
2023.
C67.
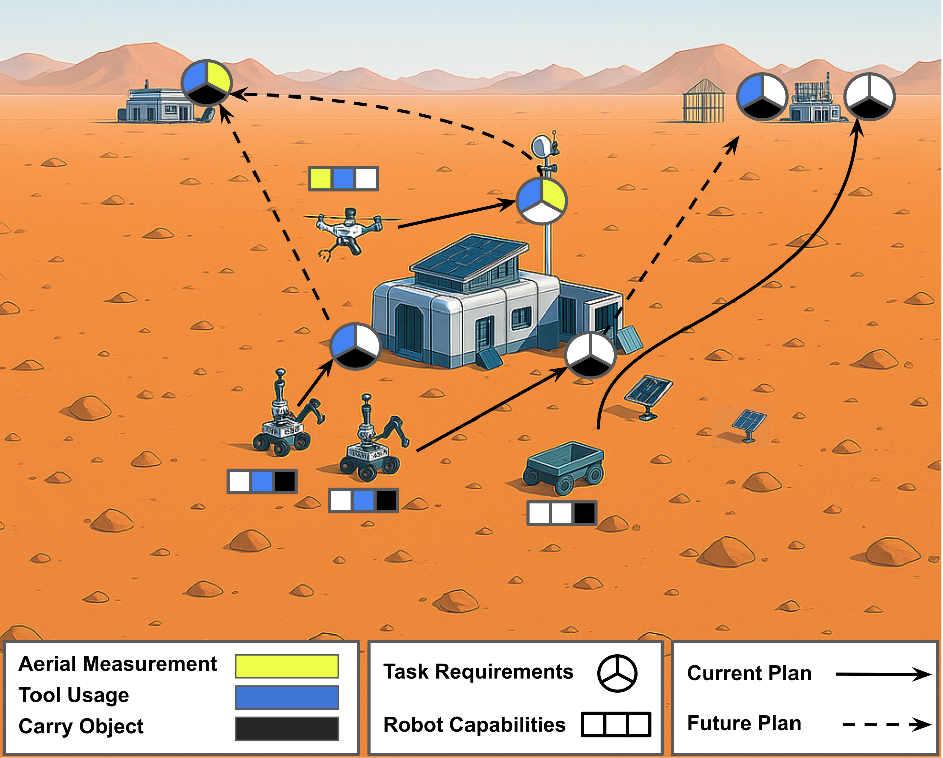
Designing Heterogeneous Robot Fleets for Task Allocation and Sequencing
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS),
2023.
C66.
Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems,
2023.
C65.
Reinforcement Learning from Simulation to Real World Autonomous Driving using Digital Twin
In IFAC World Congress,
2023.
C64.
A Framework for Fast Prototyping of Photo-realistic Environments with Multiple Pedestrians
In , in IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
C63.
Wi-Closure: Reliable and Efficient Search of Inter-Robot Loop Closures Using Wireless Sensing
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
C62.
Autotuning Symbolic Optimization Fabrics for Trajectory Generation
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
C61.
Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments
In IEEE International Conference on Robotics and Automation (ICRA),
2023.
C60.
Globally Guided Trajectory Planning in Dynamic Environments
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
C59.
Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals
In , in IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
W10.
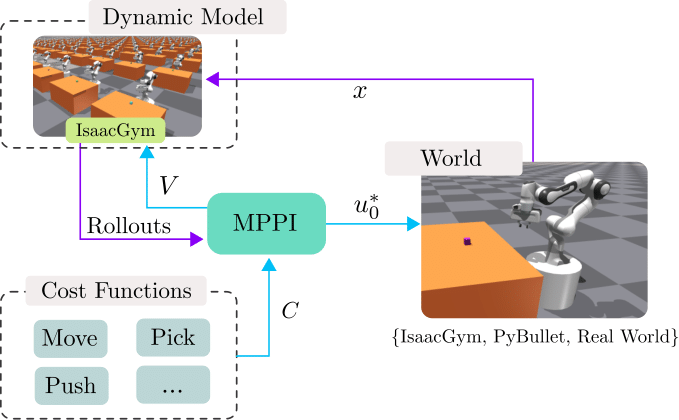
Sampling-Based MPC Using a GPU-parallelizable Physics Simulator as Dynamic Model: an Open Source Implementation with IsaacGym
In Embracing Contacts Workshop at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
W9.
TrajFlow: Learning the Distribution over Trajectories
In 5th Workshop on Long-term Human Motion Prediction at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
2022
J40.
Large-scale online ridesharing: the effect of assignment optimality on system performance
In Journal of Intelligent Transportation Systems,
2022.
J39.
Visually-Guided Motion Planning for Autonomous Driving from Interactive Demonstrations
In IFAC Engineering Applications of Artificial Intelligence Journal,
2022.
J38.
Distributed Nonlinear Trajectory Optimization for Multi-Robot Motion Planning
In IEEE Transactions on Control Systems Technology (T-CST),
2022.
J37.
Learning Interaction-Aware Guidance for Trajectory Optimization in Dense Traffic Scenarios
In IEEE Transactions on Intelligent Transportation Systems (T-ITS),
2022.
J36.
Probabilistic risk metric for highway driving leveraging multi-modal trajectory prediction
In , IEEE Transactions on Intelligent Transportation Systems (T-ITS),
2022.
J35.
A business class for autonomous mobility-on-demand: Modeling service quality contracts in dynamic ridesharing systems
In , Transportation Research Part C: Emerging Technologies,
2022.
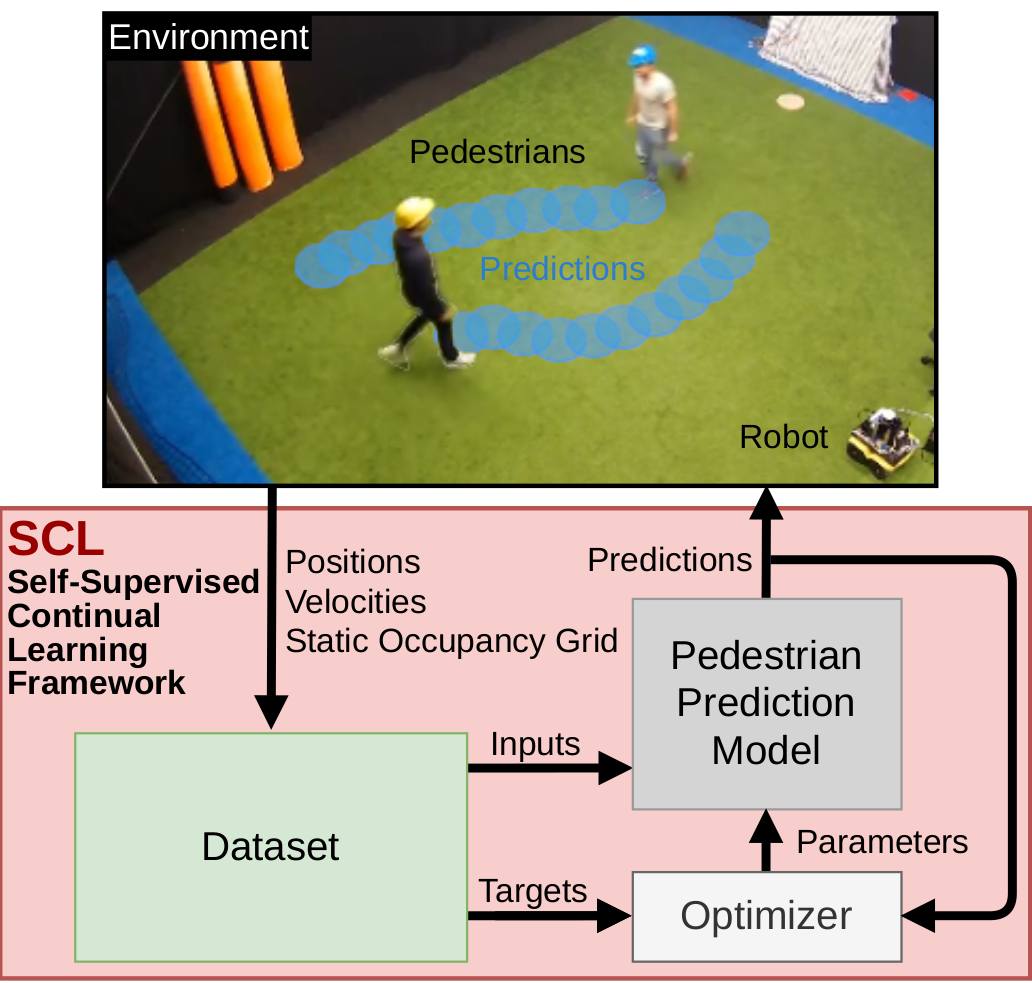
J34.
Improving Pedestrian Prediction Models with Self-Supervised Continual Learning
In , IEEE Robotics and Automation Letters (RA-L),
2022.
J33.
Decentralized Probabilistic Multi-Robot Collision Avoidance Using Buffered Uncertainty-Aware Voronoi Cells
In Autonomous Robots (AURO),
2022.
C58.
Do we use the Right Measure? Challenges in Evaluating Reward Learning Algorithms
In Conference on Robot Learning (CoRL),
2022.
C57.
Routing of Heterogeneous Fleets for Flash Deliveries via Vehicle Group Assignment
In Proc. 2022 IEEE - Int. Conf. on Intelligent Transportation (ITSC),
2022.
C56.
Error-Bounded Approximation of Pareto Fronts in Robot Planning Problems
In 15th Workshop on the Algorithmic Foundations of Robotics (WAFR),
2022.
C55.
Prediction-Based Reachability Analysis for Collision Risk Assessment on Highways
In IEEE Intelligent Vehicles Symposium (IV),
2022.
C54.
Regulations Aware Motion Planning for Autonomous Surface Vessels in Urban Canals
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2022.
C53.
Where to Look Next: Learning Viewpoint Recommendations for Informative Trajectory Planning
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2022.
C52.
Learning Mixed Strategies in Trajectory Games
In , Proc. of Robotics: Science and Systems (RSS),
2022.
C50.
Online Multi-Robot Task Assignment with Stochastic Blockages
In IEEE Conference on Decision and Control (CDC),
2022.
W8.
Local Planner Bench: Benchmarking for Local Motion Planning
In ,
2022.
W7.
Learning a Guidance Policy from Humans for Social Navigation
In Social Robot Navigation: Advances and Evaluation at IEEE International Conference on Robotics and Automation (ICRA),
2022.
2021
J32.
How to split the costs and charge the travellers sharing a ride? Aligning system's optimum with users' equilibrium
In , European Journal of Operational Research,
2021.
J31.
Anticipatory routing methods for an on-demand ridepooling mobility system
In , Transportation,
2021.
J30.
On-demand ridesharing with optimized pick-up and drop-off walking locations
In , Transportation Research Part C: Emerging Technologies,
2021.
J29.
Integrated Task Assignment and Path Planning for Capacitated Multi-Agent Pickup and Delivery
In , IEEE Robotics and Automation Letters (RA-L),
2021.
J28.
Where to go next: Learning a Subgoal Recommendation Policy for Navigation in Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
J27.
Learning Interaction-Aware Trajectory Predictions for Decentralized Multi-Robot Motion Planning in Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
J26.
Scenario-Based Trajectory Optimization in Uncertain Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
C49.
On-demand Grocery Delivery From Multiple Local Stores With Autonomous Robots
In Proc. 3rd IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS'21),
2021.
C48.
Multi-robot Task Assignment for Aerial Tracking with Viewpoint Constraints
In Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2021.
C47.
Towards a geographically even level of service in on-demand ridepooling
In Proc. 2021 IEEE - Int. Conf. on Intelligent Transportation (ITSC),
2021.
C46.
Online Informative Path Planning for Active Information Gathering of a 3D Surface
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2021.
C45.
Coupled mobile manipulation via trajectory optimization with free space decomposition
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2021.
C44.
Curvature Aware Motion Planning with Closed-Loop Rapidly-exploring Random Trees
In IEEE Intelligent Vehicles Symposium (IV),
2021.
2020
J25.
Social Trajectory Planning for Urban Autonomous Surface Vessels
In , IEEE Transactions on Robotics (T-RO),
2020.
J24.
Unreliability in ridesharing systems: Measuring changes in users' times due to new requests
In , Transportation Research Part C: Emerging Technologies,
2020.
J23.
If you are late, everyone is late: late passenger arrival and ride-pooling systems' performance
In Transportmetrica A: Transport Science,
2020.
J22.
Online Trajectory Planning and Control of a MAV Payload System in Dynamic Environments
In Springer Autonomous Robots,
2020.
J21.
Trajectory Optimization and Situational Analysis Framework for Autonomous Overtaking with Visibility Maximization
In IEEE Transactions on Intelligent Vehicles (T-IV),
2020.
C43.
Social-VRNN: One-Shot Multi-modal Trajectory Prediction for Interacting Pedestrians
In Proc. 2020 Conference on Robot Learning (CoRL),
2020.
C42.
With Whom to Communicate: Learning Efficient Communication for Multi-Robot Collision Avoidance
In Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2020.
C41.
Ride-Sharing Efficiency and Level of Service under Alternative Demand, Behavioral and Pricing Settings
In Transportation Research Board Annual Meeting,
2020.
C40.
Anticipatory Vehicle Routing for Same-Day Pick-up and Delivery using Historical Data Clustering
In Proc. IEEE Int. Conf. on Intelligent Transportation Systems (ITSC),
2020.
C39.
Robust Vision-based Obstacle Avoidance for Micro Aerial Vehicles in Dynamic Environments
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2020.
2019
J20.
Social behavior for autonomous vehicles
In , Proceedings of the National Academy of Sciences USA (PNAS),
2019.
J19.
Model Predictive Contouring Control for Collision Avoidance in Unstructured Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2019.
J18.
Chance-constrained Collision Avoidance for MAVs in dynamic environments
In , IEEE Robotics and Automation Letters (RA-L),
2019.
C38.
Optimizing Multi-class Fleet Compositions for Shared Mobility-as-a-Service
In Proc. IEEE Int. Conf. on Intelligent Transportation Systems (ITSC),
2019.
C37.
B-UAVC: Buffered Uncertainty-Aware Voronoi Cells for Probabilistic Multi-Robot Collision Avoidance
In Proc. 2nd IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS'19),
2019.
C36.
SafeVRU: A Research Platform for the Interaction of Self-Driving Vehicles with Vulnerable Road Users
In Proc. IEEE Intelligent Vehicles Symposium,
2019.
C35.
Optimizing Vehicle Distributions and Fleet Sizes for Mobility-on-Demand
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2019.
C34.
Distributed Multi-Robot Formation Splitting and Merging in Dynamic Environments
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2019.
2018
J17.
Flycon: Real-time Environment-independent Multi-view Human Pose Estimation with Aerial Vehicles
In , ACM Transactions on Graphics (SIGGRAPH Asia),
2018.
J16.
Planning and Decision-Making for Autonomous Vehicles
In Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, pp. 187-210,
2018.
J15.
Cooperative Collision Avoidance for Nonholonomic Robots
In IEEE Transactions on Robotics, vol. 34, no. 2, pp. 404-420,
2018.
J14.
Reactive mission and motion planning with deadlock resolution avoiding dynamic obstacles
In Autonomous Robots, Special Issue on Online Decision Making in Multi-Robot Coordination, vol. 42, no. 4, pp. 801–824,
2018.
J13.
Distributed Formation Control in Dynamic Environments
In , Autonomous Robots,
2018.
J12.
Sample Efficient Learning of Path Following and Obstacle Avoidance Behavior for Quadrotors
In IEEE Robotics and Automation Letters,
2018.
C33.
The Impact of Ridesharing in Mobility-on-Demand Systems: Simulation Case Study in Prague
In Proc. IEEE Int. Conf. on Intelligent Transportation Systems (ITSC),
2018.
C32.
Vehicle Rebalancing for Mobility-on-Demand Systems with Ride-Sharing
In Proc. of the IEEE/RSJ Conf. on Robotics and Intelligent Systems (IROS),
2018.
C31.
Multi-Objective Analysis of Ridesharing in Automated Mobility-on-Demand
In Proc. Robotics: Science and Systems (RSS),
2018.
C30.
Coordination of Multiple Vessels Via Distributed Nonlinear Model Predictive Control
In Proc. European Control Conference (ECC),
2018.
C29.
Joint Multi-Policy Behavior Estimation and Receding-Horizon Trajectory Planning for Automated Urban Driving
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2018.
2017
J11.
Safe Nonlinear Trajectory Generation for Parallel Autonomy With a Dynamic Vehicle Model
In IEEE Transactions on Intelligent Transportation Systems,
2017.
J10.
Multi-robot Formation Control and Object Transport in Dynamic Environments via Constrained Optimization
In The International Journal of Robotics Research, Vol 36, Issue 9, pp. 1000-1021,
2017.
J9.
Real-time Planning for Automated Multi-View Drone Cinematography
In ACM Transactions on Graphics SIGGRAPH, vol. 36, no. 4, Article 132,
2017.
J8.
Real-time Motion Planning for Aerial videography with Dynamic Obstacle Avoidance and Viewpoint Optimization
In , in IEEE Robotics and Automation Letters, vol. 2, no. 3, pp. 1696-1703,
2017.
J7.
On-demand High-capacity Ride-sharing via Dynamic Trip-Vehicle Assignment
In Proceedings of the National Academy of Sciences of the USA (PNAS), vol. 114, no. 3, pp. 462-467,
2017.
C28.
Compositional and Contract-based Verification for Autonomous Driving on Road Networks
In , in Proc. of the Int. Symp. on Robotics Research (ISRR),
2017.
C27.
Predictive Routing for Autonomous Mobility-on-Demand Systems with Ride-Sharing
In Proc. of the IEEE/RSJ Conf. on Robotics and Intelligent Systems (IROS),
2017.
C26.
Robust Collision Avoidance for Multiple Micro Aerial Vehicles Using Nonlinear Model Predictive Control
In Proc. of the IEEE/RSJ Conf. on Robotics and Intelligent Systems (IROS),
2017.
C25.
Trajectory Optimization for Autonomous Overtaking with Visibility Maximization
In proc. IEEE Intelligent Transportation Systems Conference,
2017.
C24.
Foresight: Remote Sensing For Autonomous Vehicles Using a Small Unmanned Aerial Vehicle
In Proc. of the Conf. on Field and Service Robotics (FSR),
2017.
C23.
A Parallel Autonomy Research Platform
In Proc. of the IEEE Symposium on Intelligent Vehicles (IV),
2017.
C22.
Parallel Autonomy in Automated Vehicles: Safe Motion Generation with Minimal Intervention
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2017.
C21.
Duckietown: an Open, Inexpensive and Flexible Platform for Autonomy Education and Research
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2017.
2016
C20.
Distributed Multi-Robot Navigation in Formation among Obstacles: A Geometric and Optimization Approach with Consensus
In , in Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (ICRA),
2016.
C19.
Pixelbots 2014
In Proc. ACM SIGGRAPH 2016 Art Gallery (SIGGRAPH '16), ACM, New York, NY, USA, 366-367,
2016.
2015
J5.
Collision Avoidance for Aerial Vehicles in Multi-Agent Scenarios
In , Autonomous Robots, vol. 39, no. 1, pp. 101–121,
2015.
C18.
Multi-robot navigation in formation via sequential convex programming
In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2015.
C17.
Collision-Free Reactive Mission and Motion Planning for Multi-Robot Systems
In Proc. of the Int. Symposium on Robotics Research (ISRR),
2015.
C16.
Local motion planning for collaborative manipulation of deformable objects in dynamic environments
In Proc. of the IEEE Int. Conf. Robotics and Automation (ICRA),
2015.
C15.
Gesture based human - robot swarm interaction applied to an interactive display
In Proc. of the IEEE Int. Conf. Robotics and Automation (ICRA),
2015.
2014
C14.
Towards Estimation and Correction of Wind Effects on a Quadrotor UAV
In Proc. of the Int. Micro Air Vehicle Conference and Competition,
2014.
C13.
Customized Sensing for Robot Swarms
In Proc. of the Int. Symposium on Experimental Robotics,
2014.
C12.
Shared Control of Autonomous Vehicles based on Velocity Space Optimization
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2014.
C11.
Viewpoint and Trajectory Optimization for Animation Display with a Large Group of Aerial Vehicles
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2014.
C10.
Human - Robot Swarm Interaction for entertainment: From animation display to gesture based control
In ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI),
2014.
Best video Award 2nd Prize.
W5.
Collaborative Motion Planning for Multi-Agent Systems
In Workshop The future of multiple-robot research and its multiple identities at the RSJ/IEEE Int. Conf. on Robotics and Intelligent Systems (IROS),
2014.
W4.
Multi-robot Control and Interaction with a Hand-held Tablet
In Workshop Crossing the Reality Gap: Control, Human Interaction and Cloud Technology for Multi- and Many- Robot Systems at the IEEE Int. Conf. on Robotics and Automation (ICRA),
2014.
2013
J4.
Reciprocal Collision Avoidance with Motion Continuity Constraints
In IEEE Transactions on Robotics, vol. 29, no. 4, pp. 899-912,
2013.
C9.
A message-passing algorithm for multi-agent trajectory planning
In , In Advances in Neural Information Processing Systems (NIPS),
2013.
C8.
Design and Control of a Spherical Omnidirectional Blimp
In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2013.
C7.
Collision Avoidance for Multiple Agents with Joint Utility Maximization
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2013.
2012
J3.
Image and Animation Display with Multiple Robots
In International Journal of Robotics Research, vol. 31, no. 6, pp. 753-773,
2012.
J2.
Limited benefit of Sharing Information in Multi-Agent Iterative Learning Control
In Asian Journal of Control, vol. 14, no. 3, pp. 613-623,
2012.
C6.
Object and Animation Display with Multiple Aerial Vehicles
In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2012.
C5.
Multi-Robot Formation Control via a Real-Time Drawing Interface
In Proc. of the 8th Int. Conf. on Field and Service Robots (FSR),
2012.
C4.
Reciprocal Collision Avoidance for Multiple Car-like Robots
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2012.
W2.
Human-Robot Shared Control in a Large Robot Swarm
In Workshop Many-Robot Systems: Crossing the Reality Gap at the IEEE Int. Conf. on Robotics and Automation (ICRA),
2012.
2011
C3.
Multi-Robot System for Artistic Pattern Formation
In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA),
2011.
W1.
DisplaySwarm: A robot swarm displaying images
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Symposium: Robot Demonstrations,
2011.
2010
C2.
Independent vs. Joint Estimation in Multi-Agent Iterative Learning Control
In Proc. of the Conf. on Decision and Control (CDC),
2010.
C1.
Optimal Reciprocal Collision Avoidance for Multiple Non-Holonomic Robots
In Proc. of the Int. Symp. on Distributed Autonomous Robotics Systems (DARS),
2010.
Nominated Best Student Paper Award.
2009
J1.
Numerical model for polymer electrolyte membrane fuel cells with experimental application and validation
In Asia Pacific Journal of Chemical Engineering, vol. 4, no. 1, pp. 55-67,
2009.
Patents
P06. Shared control of autonomous vehicles, US patent, 2014, led.
P05. Automated charging for aerial vehicles, US patent, 2014, led.
P04. Omnidirectional Spherical Blimp, International patent, 2012, led.
P03. Robotic Textures, US patent, 2012, led.
P02. Display with robotic pixels - divisorial, US patent, 2011, led.
P01. Display with robotic pixels, US patent 8723872.