Our Robots and Installations
The Lab
The new lab, Mobile Robotics Lab, at CoR is located at the ground floor in the F-wing of the Mechanical Engineering building at TU Delft.
The Mobile Robotics Lab is a state-of-the-art facility designed to push the boundaries of robotics research and development. The lab consist of a 13x7 m aerial
and terrestrial robot arena, and a lot of robots. The arena is equipped with a Vicon motion tracking system, a cutting-edge technology that can track objects with sub-millimeter accuracy.
This high-precision system allows us to monitor and analyze the intricate movements of robots and other objects, providing valuable data for our research.
In addition, the lab also consists of a high-end video recording system. This advanced setup enables us to capture high-quality videos, including slow-motion footage of fast-moving objects.
The combination of top-tier technology and innovative research makes the lab a leading hub for cognitive robotics.
Robots
autonomous vehicles
Toyota Prius Self-Driving Car
Self-driving vehicle with on-board perception and actuators for steering, throttling and braking.
The self-driving Toyota Prius is a joint project with the Intelligent Vehicles (IV) department. The vehicle is equipped with camera, LiDAR, radar and GPS sensors to perceive its environment and can be controlled through software to drive autonomously. More info at the project page.
flying robots
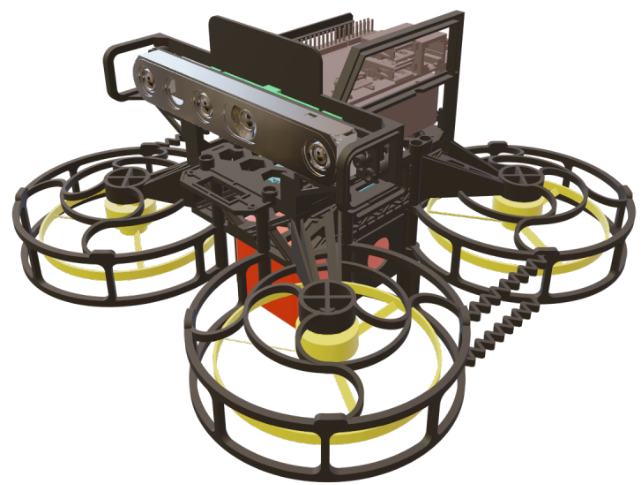
Mantis
Small PX4 based quadcopter with Intel RealSense D455 camera and NVIDIA Jetson Xavier NX module.
Hi! My name is Mantis and I am a small but powerful quadcopter. I am made of carbon fiber and 3D-printed parts. I am equipped with Realsense D455 Camera and NVIDIA Jetson Xavier NX module but my weight is only about 500 grams and my size is about 20 cm. My flight controller runs PX4 firmware. Researchers in this group use me to realize collision-free swarm flight.
NXP HoverGames Drone
Open-source drone platform used for autonomous motion planning and control tasks.
Hi! My name is HoverGames and I am a drone kit brought to the market by the Dutch company NXP Semiconductors. Researchers in this group want me to fly autonomously and safely through a lab environment with obstacles. In order to accomplish this goal, I contain the following hardware onboard: Intel RealSense D455 camera, NVIDIA Jetson Xavier NX module and a custom NXP flight controller board that is compatible with the PX4 autopilot stack. More information about me can be found on this
page.
ground robots
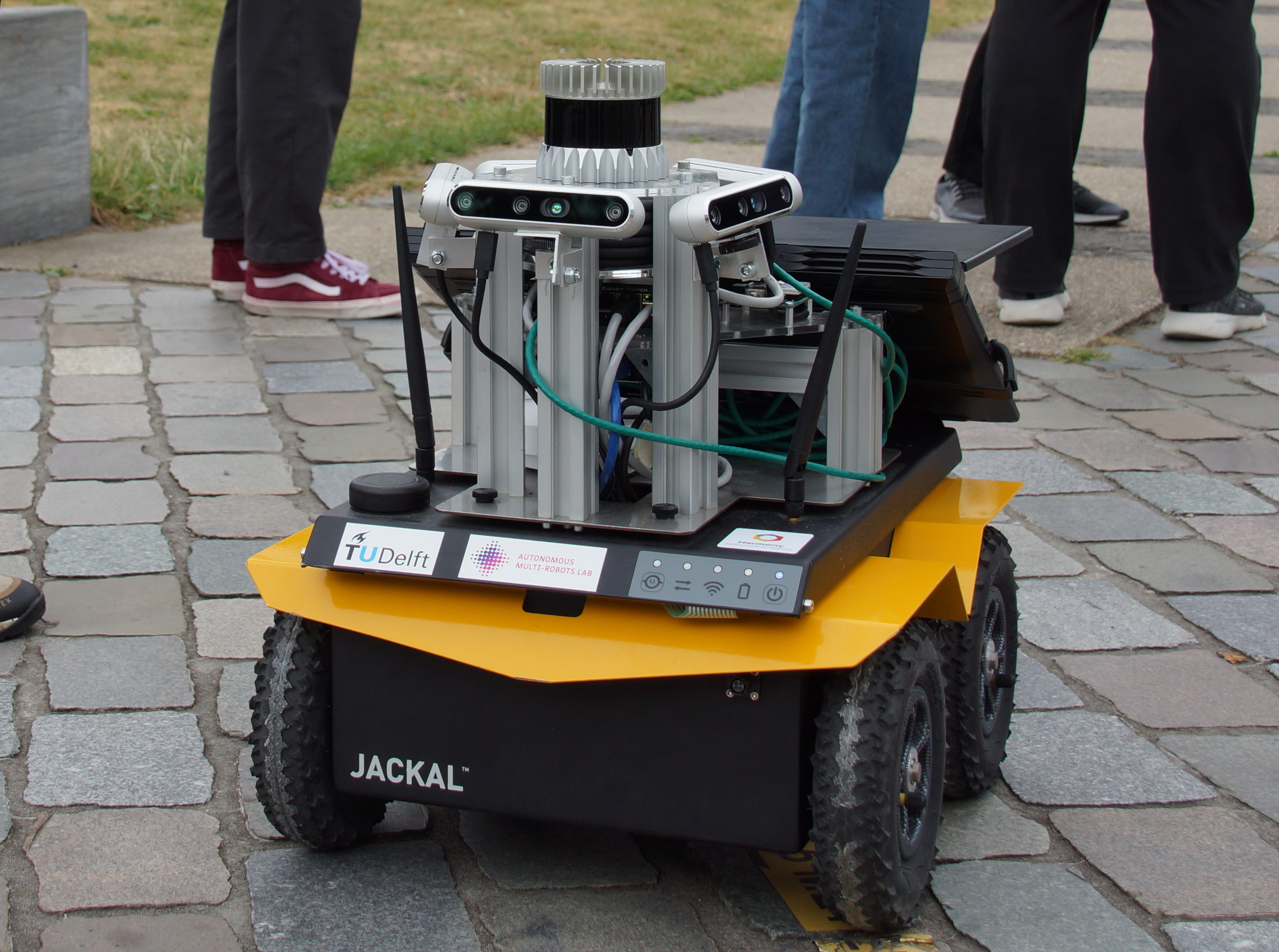
Jackal
Differential-drive robotic research platform from Clearpath with custom perception pipeline.
Hi! I am Jackal, a small and fast unmanned ground vehicle from Clearpath. Researchers in this group want me to navigate efficiently and safely around other decision making agents such as humans. But I don’t come alone. I have three brothers, with whom I also like to navigate with. I contain the following perception hardware onboard: Five Intel RealSense D455 and one Ouster OS1-64 lidar. More information about me and my brothers can be found on this
page.
mobile manipulators
Albert
Mobile manipulator with a Franka Emika panda arm.
Hi! I am Albert, a mobile manipulator working in AMR and more specifically the Airlab project. The robot is used for pick-and-place tasks in a supermarket environment.
Dinova
Mobile Manipulator consisting of a Clearpath Dingo-O (omnidirectional) and a Kinova Gen3 Lite 6-DOF arm.
Hello there! I’m Dinova 1, one half of a dynamic duo of mobile manipulators working in cluttered environments shared with humans. With my identical twin by my side, I bring robust mobility and precise manipulation capabilities to enhance productivity and efficiency in diverse settings. More information about the base can be found on this
page and about the arm on this
page. Soon, we will also be equipped with sensors.