VENI: Accurate Control of Aerial Robotic Manipulators under Uncertainties

People
Funding
This project is funded by the Netherlands Organisation for Scientific Research (NWO) Applied Sciences with project Veni 20256
About the Project
Aerial manipulators, often described as “flying hands,” can manipulate objects in midair. This is a key capability for applications such as aerial delivery, nondestructive inspection, and infrastructure maintenance. However, they are subject to significant dynamical uncertainties, which can lead to inaccurate control and unstable operation. This project aims to develop planning and control algorithms that enable aerial manipulators to perform accurate, agile, and safe manipulation tasks despite strong dynamical uncertainties, including wind gusts, unknown contact wrenches, load variations, and even system failures.
In particular, the project will leverage incremental nonlinear flight control and incremental nonlinear modeling techniques to establish a theoretical foundation for integrating incremental nonlinear flight control with various outer-loop control strategies. These include impedance control, model predictive control, and learning-based control, especially for contact-based operations where aerial manipulators experience strong dynamic coupling with manipulated objects and the environment.
Furthermore, the project will establish a comprehensive experimental validation framework to test and verify the proposed algorithms in real-world scenarios. This will be achieved through the development of novel aerial manipulator platforms that balance system complexity and performance in contact-rich aerial manipulation tasks.
Funding & Partners
This project is funded by the Dutch Research Council (NWO).
Project Demonstrations
Related Publications
Decentralized Real-Time Planning for Multi-UAV Cooperative Manipulation via Imitation Learning
In IEEE Int. Symposium on Multi-Robot & Multi-Agent Systems (MRS),
2025.
Decentralized Aerial Manipulation of a Cable-Suspended Load Using Multi-Agent Reinforcement Learning
In 2025 Conference on Robot Learning (CoRL),
2025.
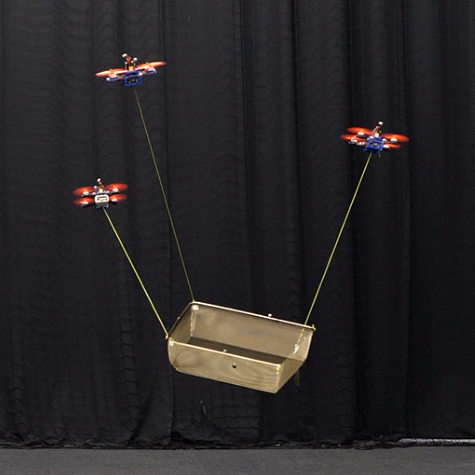
Agile and Cooperative Aerial Manipulation of a Cable-Suspended Load
In Science Robotics,
2025.