Parallelized Probabilistic Motion Planning in Dynamic Environments

People
Funding
This project is funded in part by NWO-TTW within the SafeVRU project.
About the Project
This project develops probabilistic motion planners for social robots and automated vehicles. Our main goal is to account for the uncertain future motion of obstacles, such as pedestrians, to plan safe and efficient robot motion. This uncertainty, in practice, stems from the fact that the robot cannot observe the intentions of humans with certainty. It therefore needs to account for plausible outcomes when making a decision.
We developed two model-based planning frameworks in this project:
- Scenario-Based Trajectory Optimization: To account for uncertainty associated with motion predictions of dynamic obstacles,
- Topology-Driven Trajectory Optimization: To parallelize existing optimization-based planners, such as scenario-based planning.
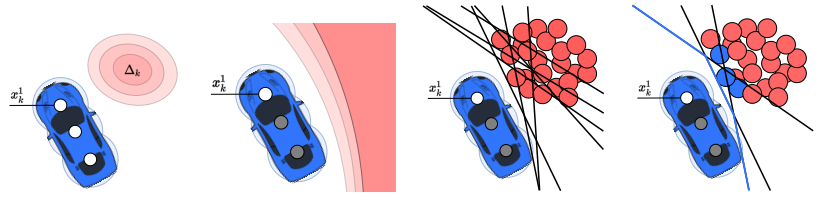
The main idea behind scenario-based planning is to sample from the distribution of the uncertainty. Each sample represents a possible future trajectory of the obstacle. We enforce collision constraints with all samples to account for the uncertainty. By sampling, we can handle any type of distribution, making the approach widely applicable. The more samples are taken, the safer our motion plan becomes. Scenario-based trajectory optimization plans probabilistic safe trajectories in real-time while incorporating generic uncertainties associated with the future motion of dynamic obstacles.
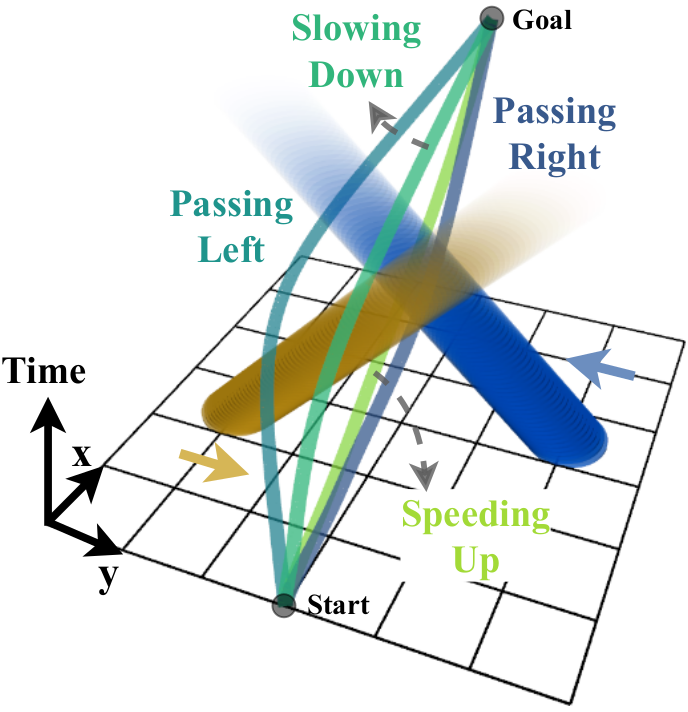
Many existing planners, in particular optimization-based methods, plan only a single trajectory. They rely on this one plan to remain safe and efficient and tend not to explore other options. Topology-driven trajectory optimization proposes a framework to parallelize existing optimization-based planners, computing several distinct trajectories that each pass the obstacles in a different way. This leads to faster motion plans without compromising on safety.
Project Demonstrations
Partners

Related Publications
A Vehicle System for Navigating Among Vulnerable Road Users Including Remote Operation
In IEEE Symposium on Intelligent Vehicles (IV),
2025.
Topology-Driven Parallel Trajectory Optimization in Dynamic Environments
In IEEE Transaction on Robotics (T-RO),
2024.
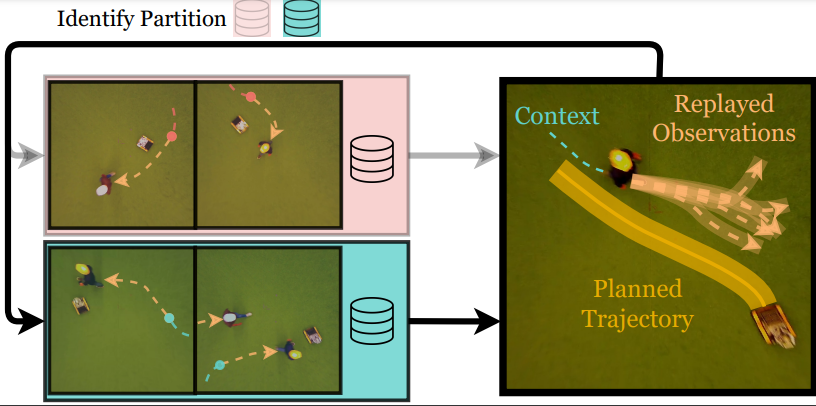
Probabilistic Motion Planning and Prediction via Partitioned Scenario Replay
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2024.
Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments
In IEEE International Conference on Robotics and Automation (ICRA),
2023.
Globally Guided Trajectory Planning in Dynamic Environments
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Scenario-Based Trajectory Optimization in Uncertain Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
Robust Collision Avoidance for Multiple Micro Aerial Vehicles Using Nonlinear Model Predictive Control
In Proc. of the IEEE/RSJ Conf. on Robotics and Intelligent Systems (IROS),
2017.