TRiLOGy: Sustainable Transportation and Logistics Over Water: Electrification, Automation, and Optimization

People
Funding
This project was funded by the NWO Top Sector Water & Maritime, the Blue route.
About the Project
TRiLOGy aims to unlock the potential of transportation and logistics in urban waterways with electric and autonomous vessels by enabling safer, more sustainable and efficient operations. The project aims at developing autonomy tools for navigation in inland waterways, among other manned and unmanned vessels. The main challenges to ensure safe and efficient navigation of autonomous vessels in urban waters is that of generating safe trajectories that (i) take into account the goals expressed by the high-level integrated strategy, (ii) take into account the complex dynamics of the vessel and (iii) coordinate with other traffic participants.
The main outcomes of the project were in the development of a motion planning algorithm, based on Model Predictive Path Integral (MPPI) control, that is able to generate safe trajectories for autonomous vessels in urban canals. The algorithm is able to take into account the dynamics of the vessel, the interactions with other traffic participants, as well as navigation rules, while also being able to adapt to changing environments and unexpected obstacles. The algorithm is designed to be used in real-time, allowing for fast and efficient navigation in complex environments.
Other developments include a robust controller for autonomous vessels, which is able to track reference trajectories in the presence of disturbances such as wind, waves and currents, which was tested in both harbour and open sea environments. We also worked on data collection, learning-based predictions, and transfer of the developed algorithms to ground robots and manipulators.
Project Demonstrations
We demonstrated our decentralized, rule- and interaction-aware MPPI planner running on-board two vessels. [1]
Crossing with Right-of-way
Head-on Encounter
With experiments on ground robots, we have shown the reactivity of the planner to unexpected dynamic obstacles [2] as well as the ability to plan accounting for prediction uncertainty [3].
Reactivity to Unexpected Obstacles
Risk-Aware Planning
In collaboration with project partners, we have collected real-world data onboards ships. We have also genereated large artificial datasets that we used to train a prediction model for vessels in urban canals [4].
Data Collection in Inland Waters
Planner with Learning-Based Predictions
In collaboration with Demcon, we have demonstrated a robust controller for reference tracking in harbour and open sea, showing good performance in the presence of wind, waves and currents [5].
Robust Control in Hourbour
Robust Control at Sea
Collaborating across projects, we have shown that the same planner used on vessels can be successfully used on ground robots and manipulators in contact rich tasks [6], [7].
Omnidirectional Push w Disturbances
Manipulator Push w Disturbances
Funding & Partners
This project is funded by the NWO Top Sector Water & Maritime: the Blue route, ‘Sustainable Transportation and Logistics over Water: Electrification, Automation and Optimization (TRiLOGy)’.





Related Publications
Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2025.
Active Disturbance Rejection Control (ADRC) for Trajectory Tracking of a Seagoing USV: Design, Simulation, and Field Experiments
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2025.
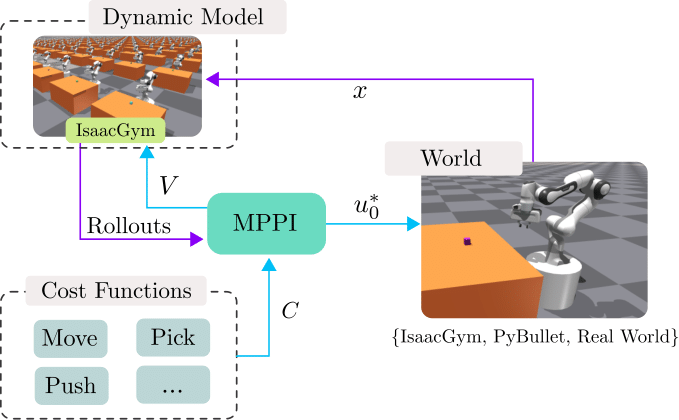
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
In IEEE Robotics and Automation Letters (RA-L),
2025.
Multi-Modal MPPI and Active Inference for Reactive Task and Motion Planning
In IEEE Robotics and Automation Letters (RA-L),
2024.
Biased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
In IEEE Robotics and Automation Letters (RA-L),
2024.
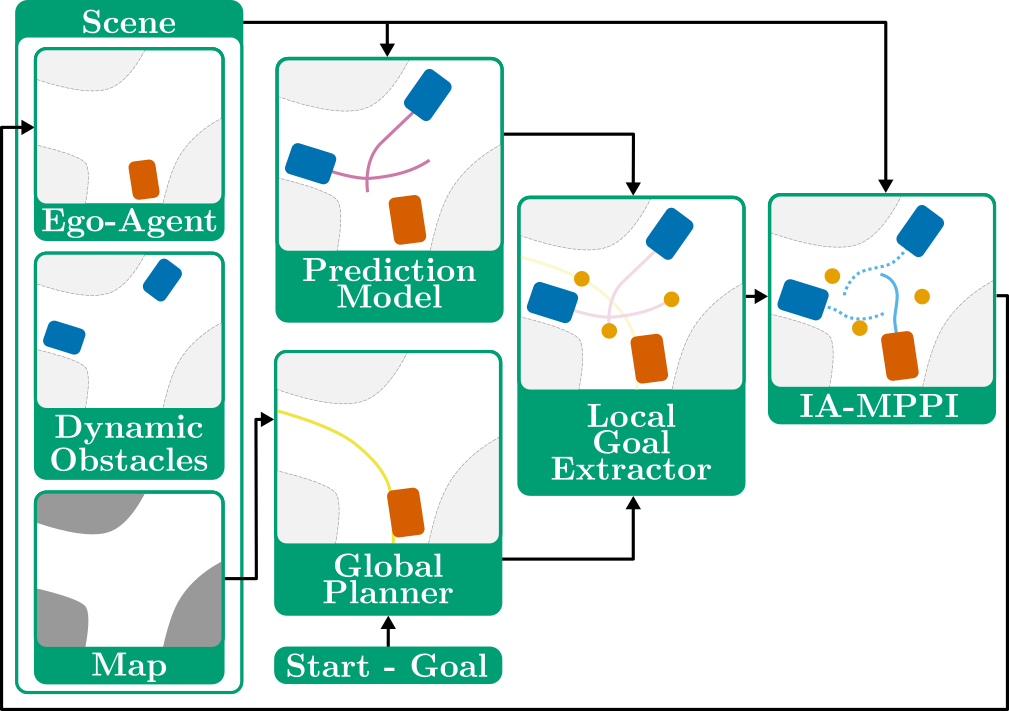
Interaction-Aware Sampling-Based MPC with Learned Local Goal Predictions
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems,
2023.
Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals
In , in IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Sampling-Based MPC Using a GPU-parallelizable Physics Simulator as Dynamic Model: an Open Source Implementation with IsaacGym
In Embracing Contacts Workshop at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Regulations Aware Motion Planning for Autonomous Surface Vessels in Urban Canals
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2022.