AI for Retail: Mobile Manipulation in Dynamic Environments

People
Funding
This project is funded by Ahold Delhaize.
About the Project
Mobile manipulators are commonly used in close proximity to each other as well as to other objects including humans. This helps improve efficiency and enables these robotic systems to be used for execution of complex tasks. However, this requires obtaining viable trajectories for multiple robots in an ever-changing environment. The AI for Retail (AIR) Lab Delft is a joint TU Delft-Ahold Delhaize industry lab which focuses on building methods to tackle such problems while testing it in a retail grocery store environment. As part of the project, we develop novel methods for trajectory generation for mobile manipulation. In the context of retail environments, it is especially important to generate motions that are safe in the proximity of humans.
Multi-robot motion planning often suffers from high computational costs especially when dealing with large number of robots. The ability of these methods to adapt online in real-time becomes essential. This project introduced multi-robot dynamics fabrics(MRDF) which builds upon dynamic fabrics that are based on local planning using a differential equation. The proposed method can be used for replanning at higher frequencies making it advantageous for complex systems in dynamic environments. Simulation experiments are performed with multiple manipulators in close proximity performing a pick-and-place task. Results highlighted the success of this approach and a significant reduction in computation time making it realistic for real-time local motion planning.
In addition to this, the project also introduced a reactive task and motion planning (TAMP) method which can cope with unforeseen disturbances during runtime. This is done by firstly developing a high-level planner that can sample parallel motion plans to minimise the cost function and computes control input. A behavior tree guides the search which allows real-time high level planning and alternatives can be used in case of disturbances. The main strength of this method is it’s ability to reason over the discrete alternatives at the motion planning level. The method was tested for push-pull and object stacking tasks which showed it’s ability to deal with corner cases and also solve these tasks with various grasp strategies and severe disturbances.
Project Demonstrations
Funding & Partners
This project has been funded by Ahold Delhaize.
Related Publications
Local Planner Bench: Benchmarking for Local Motion Planning
In ,
2022.
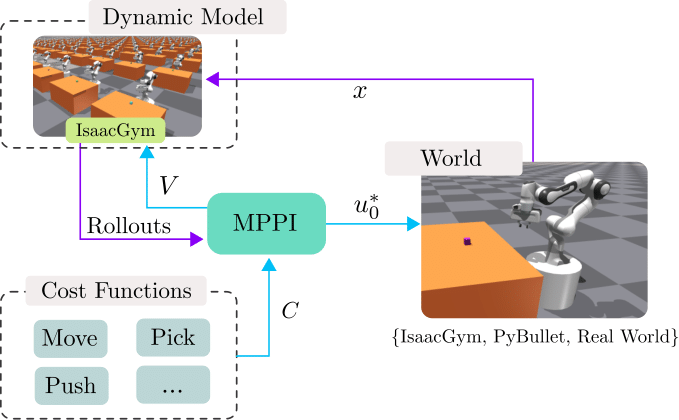
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
In IEEE Robotics and Automation Letters (RA-L),
2025.
Demonstrating Adaptive Mobile Manipulation in Retail Environments
In , Proc. of Robotics: Science and Systems (RSS),
2024.

Multi-Modal MPPI and Active Inference for Reactive Task and Motion Planning
In IEEE Robotics and Automation Letters (RA-L),
2024.
Dynamic Optimization Fabrics for Motion Generation
In IIEEE Transactions on Robotics (T-RO),
2023.
Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics
In Proc. IEEE International Symposium on Multi-Robot and Multi-Agent Systems,
2023.
Autotuning Symbolic Optimization Fabrics for Trajectory Generation
In IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Sampling-Based MPC Using a GPU-parallelizable Physics Simulator as Dynamic Model: an Open Source Implementation with IsaacGym
In Embracing Contacts Workshop at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
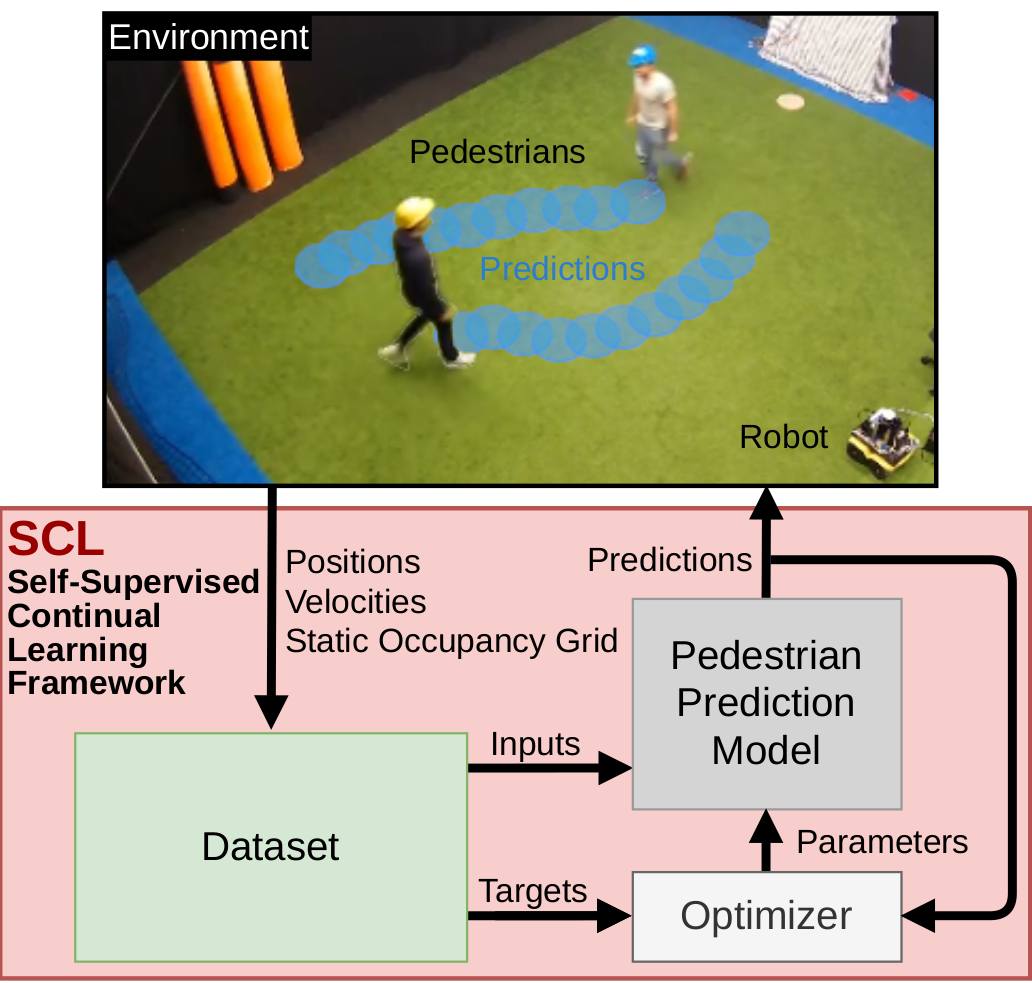
Improving Pedestrian Prediction Models with Self-Supervised Continual Learning
In , IEEE Robotics and Automation Letters (RA-L),
2022.
Coupled mobile manipulation via trajectory optimization with free space decomposition
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2021.