ACT: Perceptive Acting Under Uncertainty
People
Funding
This project is funded the the Dutch Research Council NWO-NWA, within the "Acting under Uncertainty (ACT)" project (Grant No. NWA.1292.19.298).
More LinksAbout the Project
A successful integration of autonomous robots in the real-world depends on them taking socially acceptable actions. The ACT project bridges Neuroscience, Behavioral Psychology, Robotics, and AI to study interactions with humans and autonomous systems and develop new application for safe navigation. Our Lab’s role in the project is to create a fundamental understanding of how autonomous agents can cope with uncertainty and demonstrate risk-aware autonomous agents that are demonstrably trustable and predictable.
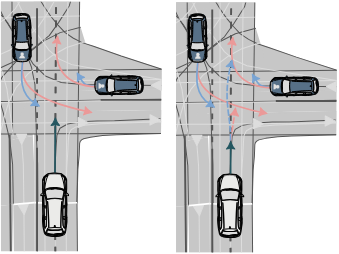
This project contributed towards improving the safety of autonomous vehicles(AVs) by introducing a method to learn human-like driving behaviours which are then encoded into a local planner. Such behaviors are desired in AVs so that human drivers can trust these systems and also enables smoother coordination with other agents on the road. This behavior is learnt through an interactive imitation learning approach which is data efficient and is then encoded into a model predictive contouring controller. The proposed method is validated using a simulator which demonstrated it’s ability to learn human-like driving behaviors.
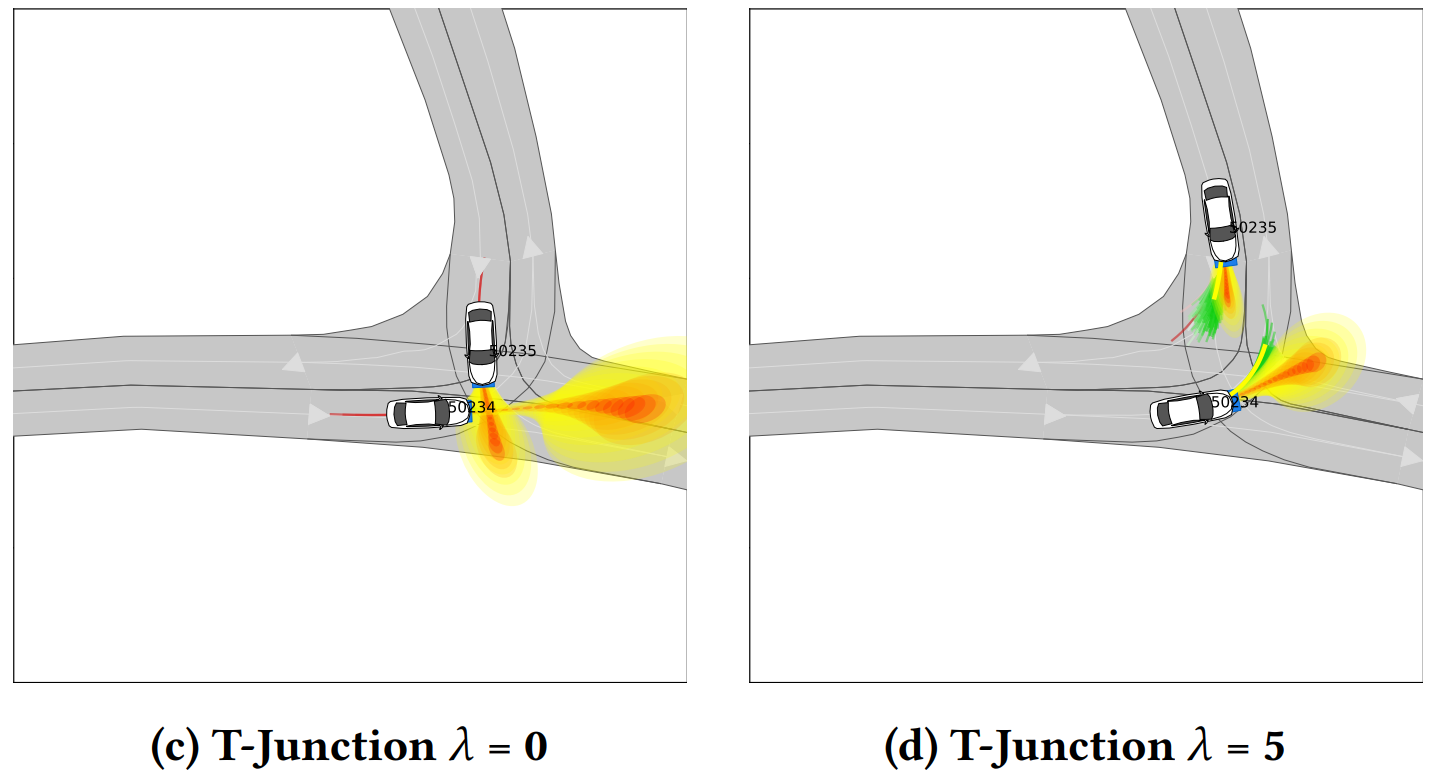
Another contribution from this project has been to predict human behavior in traffic. This is an important and challenging aspect since often times human behavior is not deterministic. Previous research has often struggled with random uncertainties in human movements which are difficult to model. A novel model called TrajFlow is presented which is capable of fitting distributions present in training samples. A recurrent neural network autoencoder is developed which captures the relevant features of a trajectory and the decoder is able to predict trajectories beyond the length of the training data.
Project Demonstrations
Funding & Partners
This project is funded the the Dutch Research Council NWO-NWA, within the “Acting under Uncertainty (ACT)” project (Grant No. NWA.1292.19.298).
Related Publications
Predictability Awareness For Efficient and Robust Multi-Agent Coordination
In 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS),
2025.
Dynamic Risk-Aware MPPI for Mobile Robots in Crowds via Efficient Monte Carlo Approximations
In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS),
2025.
ROME: Robust Multi-Modal Density Estimator
In 33rd International Joint Conference on Artificial Intelligence (IJCAI),
2024.
TrajFlow: Learning Distributions over Trajectories for Human Behavior Prediction
In IEEE Intelligent Vehicles Symposium (IV),
2024.
RACP: Risk-Aware Contingency Planning with Multi-Modal Predictions
In IEEE Transactions on Intelliegent Vehicles (T-IV),
2024.
Probabilistic Risk Assessment for Chance-Constrained Collision Avoidance in Uncertain Dynamic Environments
In IEEE International Conference on Robotics and Automation (ICRA),
2023.
TrajFlow: Learning the Distribution over Trajectories
In 5th Workshop on Long-term Human Motion Prediction at IEEE Int. Conf. on Robotics and Automation (ICRA),
2023.
Visually-Guided Motion Planning for Autonomous Driving from Interactive Demonstrations
In IFAC Engineering Applications of Artificial Intelligence Journal,
2022.
Learning Interaction-Aware Guidance for Trajectory Optimization in Dense Traffic Scenarios
In IEEE Transactions on Intelligent Transportation Systems (T-ITS),
2022.