AI for Retail: On-Demand Last-Mile Logistics
People
Funding
This project is funded by Ahold Delhaize.
More LinksAbout the Project
The AI for Retail (AIR) Lab Delft is a joint TU Delft-Ahold Delhaize industry lab. A major focus of this lab’s research is on improving on-demand last-mile logistics or flash deliveries. These are essential to ensure goods can be transported in a timely manner. More specifically, two fundamental questions critical for the success of these operations are tackled: the associated Vehicle Routing Problem and the associated Fleet Sizing Problem. This project aims to contribute algorithms to improve efficiency and effectiveness in the planning of flash delivery operations.
One method developed during this project focuses on anticipatory routing which derives predicted requests from historical data. These requests are used to understand inherent patterns in the demand. A dynamic vehicle routing solver combines these predictions with the already known requests to assign them to a fleet of vehicles. Simulation experiments are conducted to understand the effectiveness of the proposed method. The results suggested that on an average, vehicles travel shorter distances while requiring a smaller number of vehicles in comparison to other existing methods.
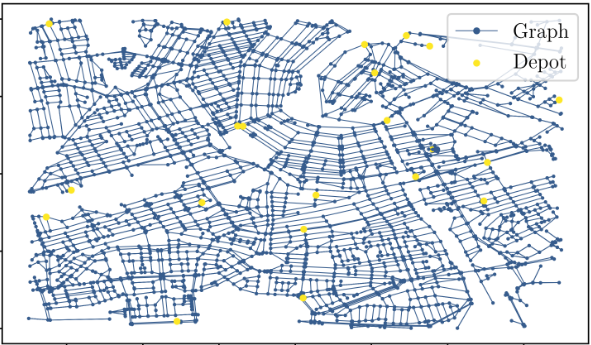
Another method developed for vehicle routing focuses on deliveries from multiple local stores with an aim to deliver orders as fast as possible within the same day. Previous research assumed robots have to deliver all loaded orders first before servicing new customers. This assumption was removed in this approach adn helps to incorporate new occuring orders within the existing plan of these robots. An optimisation method is proposed which firstly decides which local store is the most optimal to collect each order and then robots are allowed to visit a depot again to receive more parcels if it increases efficiency. The proposed method is scalable to scenarios with thousands of requests.
Project Demonstrations
Funding & Partners
This project is funded by Ahold Delhaize.
Related Publications
Fleet Sizing for the Flash Delivery Problem from Multiple Stores: a Case Study in Amsterdam
In IEEE International Conference on Intelligent Transportation Systems (ITSC),
2024.
Reducing the Minimal Fleet Size by Delaying Individual Tasks
In IEEE Transactions on Intelligent Transportation Systems,
2024.
Online flash delivery from multiple depots
In Transportation Letters,
2023.
Group-based Distributed Auction Algorithms for Multi-Robot Task Assignment
In IEEE Transactions on Automation Science and Engineering (T-ASE),
2023.
Online Multi-Robot Task Assignment with Stochastic Blockages
In IEEE Conference on Decision and Control (CDC),
2022.
Routing of Heterogeneous Fleets for Flash Deliveries via Vehicle Group Assignment
In Proc. 2022 IEEE - Int. Conf. on Intelligent Transportation (ITSC),
2022.
Anticipatory routing methods for an on-demand ridepooling mobility system
In , Transportation,
2021.
On-demand Grocery Delivery From Multiple Local Stores With Autonomous Robots
In Proc. 3rd IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS'21),
2021.
Anticipatory Vehicle Routing for Same-Day Pick-up and Delivery using Historical Data Clustering
In Proc. IEEE Int. Conf. on Intelligent Transportation Systems (ITSC),
2020.