VENI: Safe and socially intuitive navigation

People
Funding
This project is funded by the Netherlands Organisation for Scientific Research (NWO) Applied Sciences with project Veni 15916
More LinksAbout the Project
In a modern day smart city, a mobile robot needs to coexist with humans and other robots in a cluttered and dynamic environment. In the near future, fleets of autonomous boats and cars will be used for mobility on-demand. However, this would require developing control and communication methods which work for a variety of robotic systems and most importantly can be used in an ever changing surrounding. Previous research methods have typically focused on low speed operation and highly simplistic environments which are not obtained in real-life. This project focuses on high performance motion planning methods which can safely operate during a realistic demonstration and be used in a variety of challenging situations.
The key challenge involved during this decision making problem is to develop algorithms which in real-time can yield safe motion by selecting a socially intuitive path from the large number of possibile trajectories. In this regard, one algorithm that has been developed is the Model Predictive Contouring Control (MPCC) which provides real-time collision free navigation for robots in presence of other agents in an environment. This motion planner can be used to encode human-like driving behavior using machine learning techniques. This entire solution can be fully implemented on board of the robot and has been tested using various experimental setups to ensure smooth operation.
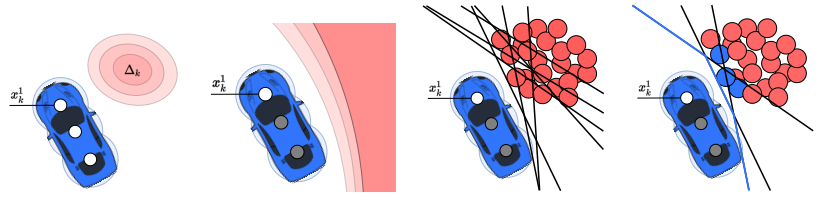
Another significant contribution has been to develop decentralized and communication free collision avoidance for multi-robot systems which can be utilised in autonomous fleet operation. This method is termed buffered uncertainty-aware voronoi cells(B-UAVC) and computes a safe region for any number of robots such that it can navigate in complex surroundings. This method is both scalable and robust to sensing uncertainties and has been tested through several experiments conducted in the lab.
Project Demonstrations
Funding & Partners
This project is funded by the Netherlands Organisation for Scientific Research (NWO) Applied Sciences with project Veni 15916.

Related Publications
Visually-Guided Motion Planning for Autonomous Driving from Interactive Demonstrations
In IFAC Engineering Applications of Artificial Intelligence Journal,
2022.
Learning Interaction-Aware Guidance for Trajectory Optimization in Dense Traffic Scenarios
In IEEE Transactions on Intelligent Transportation Systems (T-ITS),
2022.
Decentralized Probabilistic Multi-Robot Collision Avoidance Using Buffered Uncertainty-Aware Voronoi Cells
In Autonomous Robots (AURO),
2022.
Where to go next: Learning a Subgoal Recommendation Policy for Navigation in Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
Learning Interaction-Aware Trajectory Predictions for Decentralized Multi-Robot Motion Planning in Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
Scenario-Based Trajectory Optimization in Uncertain Dynamic Environments
In , IEEE Robotics and Automation Letters (RA-L),
2021.
Curvature Aware Motion Planning with Closed-Loop Rapidly-exploring Random Trees
In IEEE Intelligent Vehicles Symposium (IV),
2021.
Online Trajectory Planning and Control of a MAV Payload System in Dynamic Environments
In Springer Autonomous Robots,
2020.
Trajectory Optimization and Situational Analysis Framework for Autonomous Overtaking with Visibility Maximization
In IEEE Transactions on Intelligent Vehicles (T-IV),
2020.
Social-VRNN: One-Shot Multi-modal Trajectory Prediction for Interacting Pedestrians
In Proc. 2020 Conference on Robot Learning (CoRL),
2020.
Robust Vision-based Obstacle Avoidance for Micro Aerial Vehicles in Dynamic Environments
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2020.
Chance-constrained Collision Avoidance for MAVs in dynamic environments
In , IEEE Robotics and Automation Letters (RA-L),
2019.
Optimizing Multi-class Fleet Compositions for Shared Mobility-as-a-Service
In Proc. IEEE Int. Conf. on Intelligent Transportation Systems (ITSC),
2019.
B-UAVC: Buffered Uncertainty-Aware Voronoi Cells for Probabilistic Multi-Robot Collision Avoidance
In Proc. 2nd IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS'19),
2019.
Optimizing Vehicle Distributions and Fleet Sizes for Mobility-on-Demand
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2019.
Distributed Multi-Robot Formation Splitting and Merging in Dynamic Environments
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2019.
SafeVRU: A Research Platform for the Interaction of Self-Driving Vehicles with Vulnerable Road Users
In Proc. IEEE Intelligent Vehicles Symposium,
2019.
Distributed Formation Control in Dynamic Environments
In , Autonomous Robots,
2018.
Sample Efficient Learning of Path Following and Obstacle Avoidance Behavior for Quadrotors
In IEEE Robotics and Automation Letters,
2018.
Vehicle Rebalancing for Mobility-on-Demand Systems with Ride-Sharing
In Proc. of the IEEE/RSJ Conf. on Robotics and Intelligent Systems (IROS),
2018.
Coordination of Multiple Vessels Via Distributed Nonlinear Model Predictive Control
In Proc. European Control Conference (ECC),
2018.
Joint Multi-Policy Behavior Estimation and Receding-Horizon Trajectory Planning for Automated Urban Driving
In Proc. IEEE Int. Conf. on Robotics and Automation (ICRA),
2018.