Research
Autonomous Vehicles
We work on self-driving cars and vessels that are capable of navigating in dense urban scenarios. We combine optimization and learning methods to model interaction and balance risk. With our collaborators, we have deployed our motion planners on full-scale autonomous vehicles. See for example our demo at the ISTS`20 Conference (Video)
Entertainment and Education Robots
Robots can play an important role in entertainment, art and education. We support those efforts. For example, we have contributed novel robot designs and multi-robot systems, such as a first-of-its-kind interactive display, and helped in developing the Duckietown open robotics education.
Flying Robots
We empower Micro Aerial Vehicles with autonomous capabilities to navigate in complex environments and seamlessly coordinate with other agents. For this, we have proposed novel methods for aerial cinematography, formation control, motion planning, learning of communication policies and exploration.
Mobile Manipulation
From healthcare to retail, passing by the high-tech industry, mobile robots will move in and manipulate their environment. However, how can we create robots, particularly mobile manipulators that can work alongside humans in highly dynamic and unpredictable environments? The problem is that right now, mobile manipulators are simply not ready for such a deployment. It is not possible to program a robot for everything that might happen and it is very hard to perform a variety of complex tasks while still maintaining a high degree of reliability. We develop novel algorithms for improved reliability in human-shared environments, based on optimization fabrics, learning and sampling-based model-predictive control.
Social Robots
The vision of ground robots seamlessly operating among humans requires novel approaches which enhance classic robot motion planning by accounting for interaction effects and social preferences. Within our group we address social motion planning using learning from demonstrations, game theory and optimal control.
On-Demand Transportation
On-demand transportation will transform our cities and factories by providing timely and convenient transportation anywhere, and anytime. However, to achieve that goal complex optimization problems have to be solved efficiently. Within our group we work on efficient,large-scale task-assignment and routing methods for on-demand ride-sharing for inner city transportation of people, on-demand last-mile logistics, on-demand transportation in human-centric environments such as hospitals and distributed multi-robot task assignment.

SECURE: Secure Interaction-aware Multi-robot Cooperation
The project aims to create a comprehensive framework that enables mobile robots to cooperate in a safe, secure, and privacy-preserving manner. By focusing on interaction-aware navigation, the project will develop strategies for robots to operate effectively near humans and other robotic agents to accomplish mission objectives.
Continue reading
OpenBots: Open world autonomy of robots by common sense AI
Advanced robots are remarkable successful in conducting a specific task, yet only when operating in static and predictable environments. Unfortunately, the operability of existing robotics stalls catastrophically when significant or unpredictable events occur, as it breaks their closed world assumption. The OpenBots project aims to turn robots from automated systems operating in a closed-world into autonomous systems that operate in the real, open world.
Continue reading
VENI: Accurate Control of Aerial Robotic Manipulators under Uncertainties
Aerial manipulators as flying hands can manipulate objects in the air, which is a key capability for applications such as aerial delivery, nondestructive inspection, and infrastructure maintenance. However, aerial manipulators are subject to dynamical uncertainties, which can lead to inaccurate control and unstable operation. This project aims to develop planning and control algorithms that enable aerial manipulators to perform accurate, agile, and safe manipulation of tasks in the presence of strong dynamical uncertainties, such as wind gusts, unknown contact wrenches, load variations, and even system failures.
Continue reading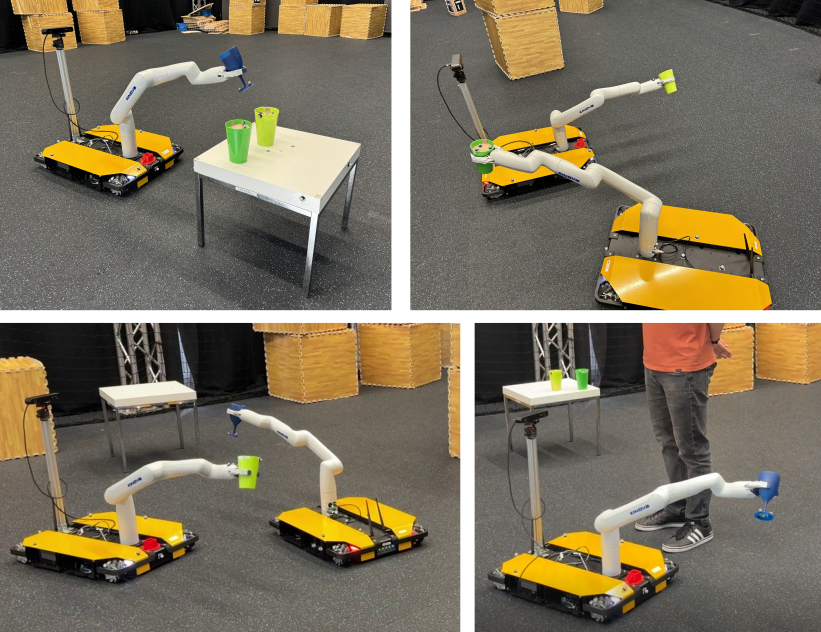
INTERACT: Intuitive Interaction for Robots among Humans
In this project, interactions of mobile robots and humans is key. This concept is considered on multiple spatio-temporal granularities ranging from individual interactions to the macro interaction of a robot fleet with humans, and from short term (local) to long term (global) effects of the interaction.
Continue reading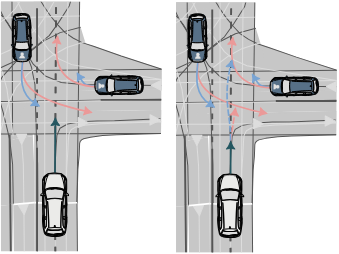
ACT: Perceptive Acting Under Uncertainty
The ACT project bridges Neuroscenice, Behavioral Psychology, Robotics, and AI to study interactions with humans and autonomous systems and develop new application for safe navigation. Our Lab's role in the project is to create a fundamental understanding of how autonomous agents can cope with uncertainty and demonstrate risk-aware autonomous agents that are demonstrably trustable and predictable.
Continue reading
Game-Theoretic Motion Planning for Multi-Agent Interaction
This project brings tools from the field of dynamic game theory to robotic motion planning. This combination enables new motion-planning algorithms that allow a robot to strategically interact with other agents while accounting for their unknown—potentially malicious—intents.
Continue reading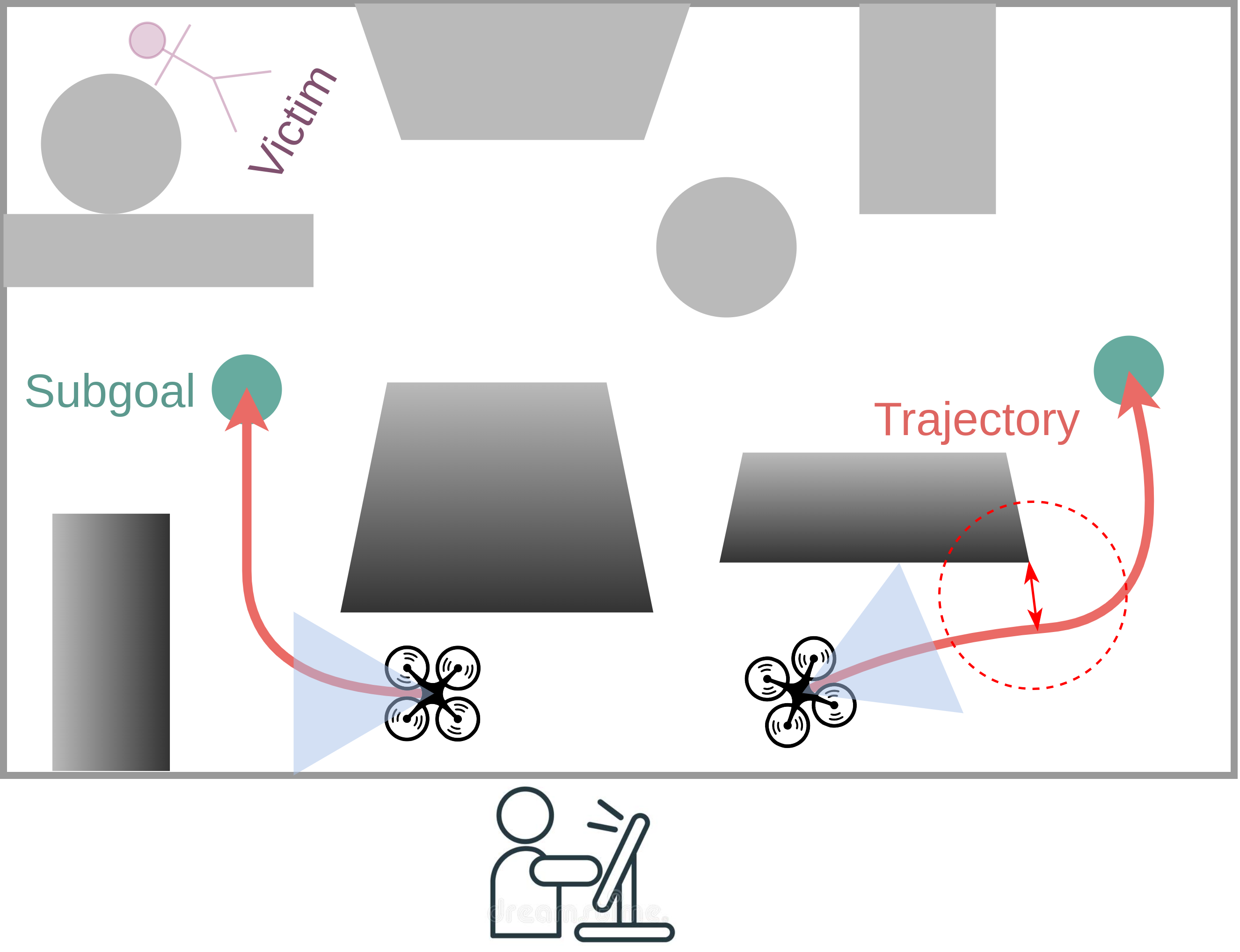
Autonomous Drones for Emergency Responders
How can autonomous drones support operations of emergency responders such as the police? This project targets scenarios such as search and rescue or reconnaissance in large, unknown and potentially hazardous environments, where it can be difficult or even dangerous for policemen to operate and fulfil the task.
Continue reading
Future transport systems: On-Demand Ridepooling
Routing and analysis of on-demand ridepooling systems, and integration into public transport.
Continue reading
HARMONY: Assistive Robots for Healthcare
Within this project we combine robotic mobility and manipulation modalities in complex, human-centred environments.
Continue reading
TRiLOGy: Sustainable Transportation and Logistics Over Water: Electrification, Automation, and Optimization
Together with industry partners, we develop motion planning algorithms to navigate urban canals accounting for the interactions with other vessels.
Continue readingDistributed high-level scene reasoning with teams of heterogeneous robots
In this project, we explore how a team of diverse robots can collaboratively monitor complex environments, such as bustling seaports or major city events. Equipped with varied sensors like cameras and microphones, each robot gathers data from its unique perspective...
Continue reading
Parallelized Probabilistic Motion Planning in Dynamic Environments
This project develops probabilistic motion planners for social robots and automated vehicles. Our main goal is to account for the uncertain future motion of obstacles, such as pedestrians, to plan safe and efficient robot motion.
Continue reading
SAFEUP
This project focuses on developing methods to validate driving safety for autonomous vehicles and ensure that at each time instance, the vehicle should not have a high probability of colliding with a traffic participant. This is done using reachability analysis and developing probabilistic risk metrics capable of identifying potential crashes in advance.
Continue reading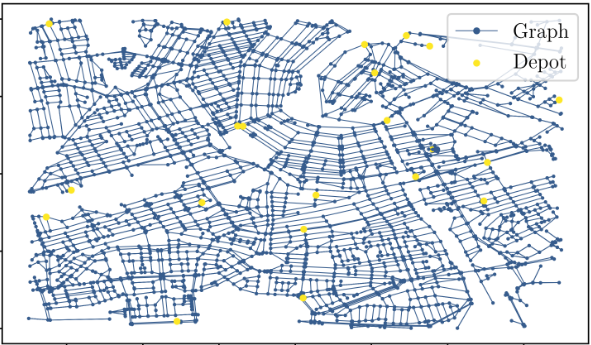
AI for Retail: On-Demand Last-Mile Logistics
Routing and Fleet Sizing for Flash Delivery operations of groceries from multiple depots.
Continue reading
AI for Retail: Mobile Manipulation in Dynamic Environments
This project looks into developing novel trajectory generation methods for mobile manipulation in dynamic environments, in the context of retail.
Continue reading
Predictive Fleet Routing and Assignment
In this project, the focus is on developing algorithms for fleet routing and assignment. This is useful for robots and autonomous vehicles which can provide delivery services for supermarkets or logistic companies. The focus is on minimising time taken and improve the routes taken by each individual robot or vehicle.
Continue reading
SAFEVRU
This project presents a research platform termed SafeVRU which focuses on the interaction between self driving vehicles and vulnerable road users like pedestrians and cyclists. A detailed design structure comprising of vehicle localisation, perception and motion planning modules are developed.
Continue reading
VENI: Safe and socially intuitive navigation
In this project, the focus is on enabling mobile robots to coexist with humans by developing novel control and communication methods to demonstrate safe motion in dynamic environments. These methods are then tested in real-life situations using autonomous boats navigating in canals and autonomous cars which will drive in an urban environment.
Continue reading
AMS Urban
In this project, the focus is on enabling mobile robots to coexist with humans by developing novel control and communication methods to demonstrate safe motion in dynamic environments. These methods are then tested in real-life situations using autonomous boats navigating in canals and autonomous cars which will drive in an urban environment.
Continue reading
Duckietown
Duckietown is an open, inexpensive and flexible platform for autonomy education and research. The platform comprises small autonomous vehicles(“Duckiebots”) built from off-the-shelf components, and cities (“Duckietowns”) complete with roads, signage, traffic lights, obstacles, and citizens (duckies) in need of transportation.
Continue reading
PostDoc-Multi
This project focuses on developing methods for multi-robot motion planning.
Continue reading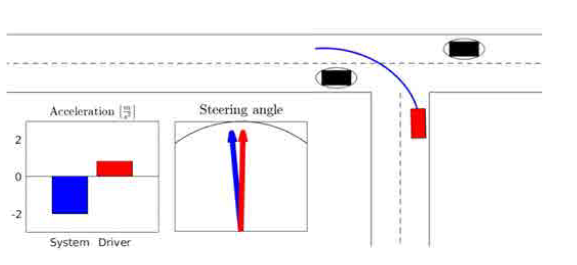
Parallel Autonomy in Automated Vehicles
In this project, the focus is on introducing an alternative approach to autonomous driving termed as "Parallel Autonomy." This method tries to solve the safety problem associated with self driving.
Continue reading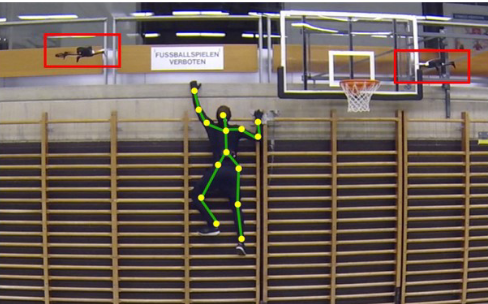
Real time Automated Cinematography using Aerial Vehicles
In this project, automated aerial vehicles are used for real time cinematography so that stunning visuals can be obtained without the need to use expensive gear like helicopters. Algorithms are developed which can provide motion plans to a fleet of drones to enable filming in complex environments. The developed methods are then tested over a number of challenging shots to determine their effectiveness.
Continue readingPixelbots: Pixels with personality
This project introduces a new interactive form of display termed as Pixelbots which can be used to project human movements onto these fleet of bots. Various human gestures and movements can be applied to this novel display which provides an interaction between human and display systems which have not been considered in conventional technologies.
Continue reading
Multi Agent Motion Planning
In this project, the focus is on building motion planning methods for multi-robot coordination. Often times methods that work well for single robots do not scale well with increasing robot density. Here, the focus is on both car-like robots and aerial vehicles and the developed methods have been tested through several experiments to ensure effective performance.
Continue reading